
Submitted:
30 July 2024
Posted:
31 July 2024
You are already at the latest version
Abstract
The primary motivation for this work is to develop the concept of Marshall's quotient (\cite{ribeiro2016functorial}) applicable to non-commutative multirings endowed with involution, expanding the main ideas of the classical (= commutative, without involution) case presented in Marshall's seminal paper \cite{marshall2006real}. We define two multiplicative properties to deal with the involutive case and characterize their Marshall quotient. Besides, this article presents various cases showing that the ''multi'' version of rings with involution offers many examples, applications, and relatives in (multi) algebraic structures.
Keywords:
multirings
; involutions
; abstract real algebra
1. Introduction
Multialgebraic structures are ”algebraic-like” structures endowed with multiple valued operations. The definition and the study of the concept of multigroup started in the 1930s; in the 1950s, the commutative hyperrings were introduced. Since then, research on these (multi)structures and a broad amount of applications have been developed.
There are many instances of (multi-)algebraic structures codifying the nature of mathematical objects using operations, we remember some basic examples and provide others considering the non-commutative case.
Also, the exploration of this subject remains open compared to the classical case. The natural maturity of the subject provided us with polynomials [3], linear algebra [4], and orderings [5].
The main purpose of the present work is to provide the fundamental steps to expand Marshall’s seminal paper [2] to the context of non-commutative multirings with involutions: this concerns mainly in provide and study the expansion of the notion of “Mashall’s quotient” (see [1]), since it is a fundamental construction in abstract notions of real algebra and real algebraic geometry (space of signs [6]; abstract real spectra [7]; real semigroups [8]; real reduced multirings [2]). Building over this basis, a future work will be devoted to developing a “real spectra” for non-commutative rings with involutions, a preparation to establish an abstract theory of hermitian forms ([9]).
Considering this context, we introduce the notion of Marshall’s quotient available for involutive (non-commutative) multirings and discuss some applications to quaternion algebras over formally real fields. The main technical results obtained are Theorems 4.11, 4.14, and 4.16. To illustrate an application, in Section 5 we provide the:
Theorem 1.1
(5.4). Let R be a commutative ring and A be a R-algebra with involution σ. Denote
If , then is a (non-commutative) hyperring.
Outline:
In Section 2, we provide a brief introduction to multi/super-structures relevant to this work. We offer a non-standard example that extends Krasner’s hyperfield and the signal hyperfield in Example 2.5. In Section 3, the basic objects of the theory of (non-commutative) multirings with Involution are introduced and, the reader is invited to compare this subject theory with the classical theory. Besides, we treat various constructions and examples such as multigroups, products, and matrices. In Section 4, we define Marshall’s quotient on involutive multialgebras and analyze conditions for their existence using some ”coherent” approach. Theorem 4.11 presents two types of quotients characterized by certain multiplicative subsets. Nevertheless, many relations can be considered in taking classes in the quotient, we deal with four different possibilities and show how they are similar (Lemma 4.6). Moreover, in developing some particular examples, we verify the independence between the conditions in 4.11. Besides, the available quotient accommodates a ”concrete” path encoding several types. We finish the work in Section 5, which deals with some applications and connects examples of quotients that generate well-known multi-structures.
2. Multi-Structures
We reserve this section to bring a brief background on multi-structures for the reader and establish notations.
Definition 2.1
(Adapted from Definition 1.1 in [2]). A multigroup is a first-order structure where G is a non-empty set, is a function, 1 is an element of G, is a ternary relation (that will play the role of binary multioperation, we denote for ) such that for all :
- M1 -
- If then . We write to simplify .
- M2 -
- iff .
- M3 -
- If then .
The structure is said to be commutative (or abelian) if satisfy for all the condition
- M4 -
- iff .
The structure is a commutative multimonoid (with unity) if satisfy M3, M4 and the condition for all .
Definition 2.2
(Definition 5 in [3]). A (commutative) superring is a sextuple satisfying:
- is a commutative multigroup and is a (commutative) multimonoid;
- (Null element) and for all ;
- (Weak distributive) If , then and . Or equivalently, and .
- The rule of signals holds: , for all .
Note that if , then , thus .
R is said to be a multiring if is a monoid. An hyperring R is a multiring such that if for , and . A multiring (respectively, an hyperring) R is said to be a multidomain (hyperdomain) if it does not have zero divisors. A commutative multiring R will be a multifield if every non-zero element of R has a multiplicative inverse;
If , then and . Observe that hyperfields and multifields coincide. Indeed, by definition, every hyperfield is multifield, and, for a given multifield R, if then
whenever . Therefore, .
Definition 2.3.
Let A and B superrings. A map is a morphism if for all : 2
- and ;
- ;
- ;
- if then .
A morphism f is a full morphism if for all ,
In this text, we provide some examples and treat about (noncommutative) multirings. For more details, we recommend the reader to check [3,10,11,12,13,14,15], and [16] for advances and results in multiring/hyperring (commutative) theory.
Example 2.4.
- Suppose that is a group. Defining , and , we have that is a multigroup. In this way, every ring, domain, and field is a multiring, multidomain and hyperfield, respectively.
- Let with the usual product and the sum defined by relations , and . This is a hyperfield called Krasner’s hyperfield [17].
- is the “signal” hyperfield with the usual product (in ) and the multivalued sum defined by relations
- For every multiring R, we can define the opposite multiring which has the same structure unless is the opposite monoid of , i.e., is the reverse multiplication. The null element and the weak distributive properties are both sides satisfied in since they are satisfied at (both) opposite sides in R.
The next example codifies the structure of ranks of square matrices.
Example 2.5
(Superrings of Signed Ranks). Consider and
the superring endowed with addition ⊕ and multiplication ⊙ defined by:
- ()
- , and .
- (K1)
- 0 is an identity with respect to the addition ⊕;
- (K2)
- whenever ;
-
(n is even) ;.
-
(n is odd) ;.
- (K3)
- is an identity with respect to the multiplication ⊙ and ;
- (K4)
- For ,
We denote the Superrings of ranks by , whose axioms are identical except that .
Example 2.6
We define then-kaleidoscope multiring by , where is the restriction of the opposite map in , is given by the rules:
and is given by the rules:
With the above rules we have that is a multiring which is not an hyperring for because
and . Note that and .
Example 2.7
(Triangle Hyperfield [18]). Let be the set of non-negative real numbers endowed with the following (multi)operations:
Actually, this is an hyperfield that does not satisfies the double distributive property (see 5.1 in [18] for more details).
Example 2.8.
- The prime ideals of a commutative ring (its Zariski spectrum) are classified by equivalence classes of morphisms into algebraically closed fields, however, they can beuniformly classifiedby a multiring morphism into the Krasner hyperfield .
- The orderings of a commutative ring (its real spectrum) are classified by classes of equivalence of ring homomorphisms into real closed fields. Although, they can be uniformly classified by a multiring morphism into the signal hyperfield .
- A Krull valuation on a commutative ring with a group of values is just a morphism into the hyperfield .
3. Multialgebras with Involution
For a multiring A, we denote
the center of A. Of course, if A is commutative, . The classical theory of central algebras with involution suggests a development of this subject in a very similar way.
Definition 3.1.
- Let R be a commutative multiring, A be a (non necessarily commutative) multiring, and a homomorphism of multirings such that , then is a R-multialgebra.
- A morphism of R-multialgebras is a morphism of multirings such that .
- An involution σ over the R-multialgebra is an (anti)isomorphism of R-multialgebras where is the opposite multiring, is a homomorphism and . Thus, for all , .
- A multialgebra with involution is just a multialgebra endowed with an involution where is a multiring with involution. A morphism of multialgebras with involution is a morphism of multialgebras satisfying .
- For each commutative multiring with involution is the category of multialgebras with involution, whose objects are multialgebras with involution and morphisms are morphisms of multialgebras with involution.
Whenever the involution is clear we will omit it and write only . Note that item 1 implies that is an initial object in . Item 2 provides us that every morphism is represented by a commutative triangle.
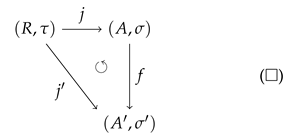
We call a subalgebra of if the diagram (□) is satisfied by the restricted identity morphism . An ideal is a invariant () non-empty subset satisfying and for all . Once J is invariant and is an isomorphism, , and thence J is a two-sided ideal. A proper ideal is an ideal . We call J a prime ideal if J is an ideal such that implies or for any pair . The smallest ideal generated by is
We define the quotient as usual (see for instance, [1,3,19], or [20]). We have many standard and effusive constructions that raise various examples in category .
Let I be a non-empty set. For a given family of multialgebras with involution, the direct product is an multialgebra with involution such that are projection morphisms for each . Indeed, is an involution over , and is a well-defined map satisfying the necessary conditions above.
Matrices over a given commutative multiring are natural constructions. Denote by the set of square matrices of order n with coefficients in and set the sum and product of matrices as follows:
For all matrices , we define the function by and (multi)operations
Since is an involution and A is a commutative multiring, it follows that is also an involution. Finally, let the diagonal morphism , which associates each with a diagonal matrix in and is the injective morphism such that . We will avoid the verification that is a multialgebra with involution, but the reader can check Section 2 of [4], Theorem 2.3, and Lemma 2.5. However, we give an example to illustrate this construction.
Example 3.2.
Consider the kaleidoscope multiring as defined in 2.6 and the matrix transposition. Then, is a multialgebra with involution.
Let and matrices over . Thus,
Therefore, .
Example 3.3.
(Adapted from [21]) Let be a group with 0 and define + the multioperation satisfying
We can define an involution σ over this structure by setting for all and . In fact, σ is additive and it is easy to verify that is a multiring with involution.
4. Marshall’S Quotient of Multialgebras with Involution
Throughout this section, we fix a R-multialgebra with involution . We are interested in Marshall coherent subsets satisfying at least one of the conditions in Theorem 4.11, i.e., normality or convexity. These conditions interact in many ways with the relations below (4.2) compared to the commutative case. First of all, we explore basic properties due to definitions.
Definition 4.1.
A subset (without zero divisors) is called a Marshall coherent subset whenever
- S is a multiplicative submonoid of
- (or, equivalently )
We call S standard if , for all . We said that S is convex if for all in the subset of nonzero divisors of A. If for all , we said that S is convex.
Immediately, convexity implies convexity. One can check Lemma 4.7 and Proposition 4.12 for a reciprocal result. From now on, we fix a Marshall coherent subset .
Definition 4.2.
Let and . We define:
- iff and ;
- iff ;
- iff and ;
- iff there is such that .
Of course, implies . Further, is an equivalence relation when S is convex. Indeed, this relation concurs with (see Lemma 4.6). We start exploring these relations and related properties of Marshall coherent subsets.
Lemma 4.3.
For , as defined above, ∼ is an equivalence relation and satisfies:
- For all and all , , , and , .
- For all if then .
Proof.
Of course ∼ is reflexive (since S has 1) and symmetric. Now let and , with , and , , . Then
and
Since S is multiplicative, we have , which implies . Hence, is an equivalence relation. Items 1 and 2 follow straightforward once S is multiplicative and invariant.
□
Lemma 4.4.
If S is standard, then is an equivalence relation and satisfies:
- For all and all , , , and , .
- For all if then .
Proof.
Reflexivity and symmetry follow immediately. Note that , enable us to rewrite the definition of as follows:
for .
Consider and which means that there exist such that and . Scaling the previous equation on the right by , and the later, on the left by , we conclude that . Thus, ∼ is transitive, that is, an equivalence relation.
For Item 1, observe that , and for all . Item 2 follows by applying both sides of . □
Lemma 4.5.
Suppose that for each . Let , the following statements are equivalent:
- such that
- such that
- such that
That is, if, and only if, . Furthermore, is an equivalence relation.
Proof.
follows immediately from the hypothesis. Thus, for each pair , . For simplicity, denote , for each .
is an equivalence relation: suppose that and for . Observe that
Also,
It follows that implies . We already prove that is transitive. Reflexivity and symmetry follow from and the equivalence of the statements 1, 2, and 3. □
We observe that, for a given Marshall’s coherent subset S, convexity is the reflexivity property of by definition. Indeed, there is a suitable relationship between the upward-selected set of relations and Marshall’s coherent convex subsets.
Lemma 4.6.
Suppose that S is convex. Let , the following statements are equivalent:
- ;
- ;
- .
Furthermore, is an equivalence relation. Additionally, for every convex , .
Proof.
There are such that
Suppose that . Then, there exist satisfying
Finally, if , then such that
To prove the final assertion, consider , for all . Since and S is convex, for all . Moreover, as long as S is invariant, if, and only if, . It turns out that if, and only if, . Thus, is reflexive and symmetric.
Finally, we prove the transitivity property. Put and . Thus, by definition, it follows that
Remember that S is closed under multiplication and convex. As follows, we have already proved the transitivity holds. We conclude that is an equivalence relation. The final assertion follows straightforward. □
The next lemma summarizes and proves many results concerning the properties of Marshall coherent subsets and the above relations.
Lemma 4.7.
Let S be a Marshall coherent set in . The succeeding statements hold:
- If for all and S is convex, then S is convex;
- If S is convex and for all non-zero divisor , then (S is normal);
- If and S is convex, then is the set of non-zero divisors, i.e. every non-zero divisor has an inverse in A;
- If S is standard, then ;
- If S is standard then if, and only if, ;
Proof.
- Let a non-zero divisor and . Thus, for some . Commuting s with x, it follows that for a suitable . Hence, convexity and closure of multiplication implies . Therefore, .
- Let a non-zero divisor. For any , for some . Therefore , which implies . Since has inverse in S, for a suitable choice of . Hence, . The reverse inclusive follows from symmetry.
-
By definition, . For the inverse inclusion, note that is a Marshall coherent set and, let and . Thus, .The same argument shows that y has the right inverse . Note that . Thus, , implies , for some . Scaling by both right sides of equation, we obtain . Hence .
- By hypothesis, . Hence, such that . Direct calculations show it is a both-side unique inverse.
- The statement has straightforward proof by scaling and dividing.
□
For each , denote an element in (whenever it exists) by . We have well-defined rules
Observe the involutory structure can be defined in the very same way for superrings.
Definition 4.8.
A superring with involution is a superring satisfying (mutatis mutandis) the axioms for multialgebras with involution.
Theorem 4.9.
The structure is a superring with involution . If S is standard, then is a superring with involution .
Proof.
Just proceed with a very similar argument to the one used in Theorem 5.2. □
We define existing quotients for general Marshall coherent subsets. In the sequence, we deal in particular with normality and convexity.
Definition 4.10.
We define the superring as the Marshall’s Quotient of A by S, and denote it by .
Whenever ∼ is chosen, we might indicate the Marshall subset S by adding it to the index, i.e., writing .
Theorem 4.11.
Let be a Marshall coherent subset of a multiring A satisfying one of the additional conditions below
- (Normal) , for all .
- (Convex) For all , a nonzero divisor in A, .
If is a multialgebra with involution, the set is a multiplicative submonoid of . Moreover, defines a -multialgebra structure over , and is an involution over the -multialgebra . In both cases, is a multiring.
Proof.
Once is a homomorphism, if in R, then . It is easy to check that is a multiplicative submonoid of R and, due to S being Marshall coherent, for all . Thus, whenever . We conclude that is Marshall coherent,i.e. is a multiring with involution .
Now, consider the following diagram:
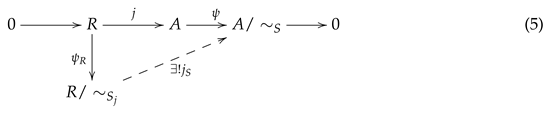
(1) If , then can be read as if, and only if, for some . Previous constructions (see 4.9) and demonstrations show that is a superring. Let and be elements in , thus and for some . Scaling equations and comparing gives us . Which means that . Therefore, and, is a multiring.
By the universal property of the quotient , is unique. Since all arrows are homomorphisms, is multialgebra. Furthermore, S is invariant, which means . Consequently, the induced antihomomorphism such that is well-defined and an involution over .
(2) Let . In this case, 4.6 and the preceding case show that is a multiring. The proof is the same as before since 4.9 still holds.
□
The above theorem provides us with two kinds of quotients lying in the class of multrings. One can wonder if the quotient can give some information about the Marshall coherent subset.
Proposition 4.12.
Let be a multiring, S be a Marshall coherent subset, such that and . Then, is convex if, and only if, is convex.
Proof.
Sketch of the proof: Note that is Marshall coherent. The converse is immediate. To prove the reciprocal statement, use (since the quotient is a multiring, · is actually a usual operation) for all . □
According to the above results, some immediate examples follow below.
Example 4.13.
For a given , a -multialgebra with involution, the next sets are Marshall coherent:
- a)
- The set of all non-zero divisors ;
- b)
- The set of all invertible elements ;
- c)
- The set of all symmetric elements (in ) ;
- d)
- If for all , then is Marshall coherent and convex.
In the next section, we provide more examples minutely. For now, we treat about another kind of operations in the quotient. For , let if, and only if, there exist such that . This can be replaced in terms of the equivalent statements in 4.5 or 4.6, whether or S is convex, respectively. Hence is an equivalence relation. Moreover, each is invariant under S action, for all .
In define , and .
Theorem 4.14.
Suppose that . Then,
- is a (non-commutative) multiring.
- If A is a hyperring, then is a hyperring. In particular, if A is a ring, then is a hyperring.
- It holds the universal property of Marshall’s quotient for homomorphisms and anti-homomorphisms (= homomorphism ) such that .
Proof.
To demonstrate 1, we note that , and − are well-defined as multigroup operations, and is the null element because A is a multiring.
Suppose that . Thus, there exists satisfying in A. Therefore, (in A). Similarly, . Consequently, and .
Let . By definition, exists such that for some . However, it implies . The reciprocal is obvious.
If and , then and for . Afterward,
The last implication means . Once A is a multiring, if, and only if, follows.
We have already proved that is a multigroup. Note that exists such that for all . Thus, is a monoid. Moreover, . Finally, let and . By definition, exists such that . Since A is a multiring, . Using the ’normality property’ of S, we rewrite it as follows:
Similarly, holds. It follows that is a multiring.
For the second assertion, suppose that A is a hyperring. Let . Thus,
Therefore, . By symmetry, also follows.
To demonstrate the third statement, consider a homomorphism such that . Let and . Thus, . Define the homomorphism with . Hence, is well-defined, and , with the canonical projection. It is immediate that another homomorphism satisfying must coincide with . □
Remark 4.15.
The Theorem 4.14 is valid if S is convex. Since both conditions normality and convexity imply , we are capable of proving the distributive laws hold and the entire rest of the proof follows as above.
The next theorem distinguishes Marshall coherent subsets that lie in the center from an ordinary one.
Theorem 4.16.
Let A be a multialgebra with involution and be a Marshall coherent subset such that (thus, in particular , for all ). Then is a (non commutative) hyperring with induced involution.
Proof.
From previous considerations and 4.9, we prove that is a multiring instead of a superring, and the hyperring property still holds.
In fact, if then for some , which means and . Then , proving that is a multiring.
Now, let . Then for some , , providing equations
for some . Then
which imply . The same reasoning provides . □
5. Applications
This last section is reserved for results surrounding particular examples. We verify some quotients associated with typical multi-structures, a few of them presented in Section 2. Throughout the subsections below, we deal with technical results and interpret elements in the Marshall quotient as classes of isometric elements.
5.1. Orthogonal
Let R be a commutative ring and A be a R-algebra with involution . Denote
Once we prove that is a Marshall coherent subset then, by definition, the standard property also holds.
Lemma 5.1.
The set is non-empty and if then .
Proof.
The set is non-empty because . For the rest, note that and for all . If these imply and
□
Now let . We define
Note that if, and only if, for some , because S is Marshall coherent standard subset.
Theorem 5.2.
The structure is a superring with involution .
Proof.
Note that if, and only if, . Moreover, from the very definitions of the sum and the product we have for all ,
Now, let and . As a result, also belongs to for some . Consequently, we can express e as and x as where . Then,
Let . Then with , implying . The same reasoning provides .
Finally, let . Therefore, for some . These provide equations and . Thus,
with , concluding that . Similarly, . □
Observe that S is not necessarily convex, and neither satisfies (see 4.9). Thus, may not be a multiring.
Definition 5.3.
We define the superring as the orthogonal fragment of A, and denote by .
Theorem 5.4.
If , then is a (non-commutative) hyperring.
Proof.
This is a particular case of 4.16. □
Theorem 5.5.
Let F be a field and . Then consists of rotation matrices over F.
Proof.
Note that if, and only if, , with the transpose matrix of . Applying the definition of matrix product we have to solve the following system:
We conclude that
□
If , in (6), the second subset (with positive determinant equal to 1) is the set of orthonormal matrices or the set of linear transformations in that are rotations by some angle with and . Moreover, consider the inner product
One may check the action of elements in works as a set of isometries. In fact, solving a very similar system of equations as above, we can prove that these actions constitute a subset of isometries such that the related matrix, say , has determinant different from . Thus, this quotient describes the behavior concerning certain kinds of isometry classes considering the underlined inner product.
5.2. Quaternions over Real Closed Fields
Now we explore the diversity of quotients in quaternions. Although it includes a lot of calculations, this provides quick verification of independence regarding normal and convex quotients.
Example 5.6.
Let R be a real closed field and the corresponding quaternion algebra : it is a R-division algebra of dimension 4. Put . Note that S satisfies the second condition of the 4.11 (it is a convex set) in the previous section and .
Then as a monoid. And, in this quotient , since .
We observe that, in this case, S is also standard, "normal" and convex (see 4.7).
Example 5.7.
Let the quaternions real algebra endowed with the standard involution , for all . Set and define iff for some . Thus, , and for a nonzero element a, is the line determined by the origin and the quaternion a(without ), i. e. .
Once (actually, S has the first "normality" property of the 4.11), it is easy to check that , and , for a a pure quaternion as well. If and are quaternion numbers, then
for , , or , depending on , or and (and vice-versa), or both , respectively, for each . Hence, is the plane determined by and , containing (or not) the origin.
Example 5.8.
The orthogonal fragment : Consider the sphere of radius equal 1 centered at the origin.
Clearly, and S is a multiplicative set satisfying whenever . Once , it is immediate that S is invariant. It remains to verify that the sphere is also "a normal set" in (item 1 of 4.11), and thus the quotient is a multiring. In fact, let and , the norm is multiplicative, thus
Yet, we have , therefore
We conclude that for some , i.e., . The reverse inclusion follows by symmetry. Actually, in a general division algebra with standard involution, this property holds since .
Let iff , with . Hence, iff . It is obvious that and . The elements are spheres centered at the origin with radius . In fact, , with . Therefore, . For , is the fulfilled sphere with radius . If , both triangular inequalities and provide that is the ’hollow’ surface determined by the two spheres with coincident centers at the origin and radius and . Moreover, as a multimonoid with multiaddition satisfying:
Thus, this is the Triangle Hyperfield 2.7. In the last example, S does not satisfy the convexity property. At the same time, 5.6 shows Marshall coherent sets satisfying many properties simultaneously. These examples suggest the definitions in the last section provide elements of different types of structures and independence between statements in Theorem 4.11.
References
- de Oliveira Ribeiro, H.R.; de Andrade Roberto, K.M.; Mariano, H.L. Functorial relationship between multirings and the various abstract theories of quadratic forms. São Paulo Journal of Mathematical Sciences 2022, 16, 5–42. [Google Scholar] [CrossRef]
- Marshall, M. Real reduced multirings and multifields. Journal of Pure and Applied Algebra 2006, 205, 452–468. [Google Scholar] [CrossRef]
- Ameri, R.; Eyvazi, M.; Hoskova-Mayerova, S. Superring of Polynomials over a Hyperring. Mathematics 2019, 7, 902. [Google Scholar] [CrossRef]
- de Andrade Roberto, K.M.; de Oliveira Ribeiro, H.R.; Mariano, H.L.; Santos, K.R.P. Linear Systems, Matrices and Vector Spaces over Superfields. arXiv preprint 2023, arXiv:2303.14559. [Google Scholar]
- Kuhlmann, K.; Linzi, A.; Stojałowska, H. Orderings and valuations in hyperfields. Journal of Algebra 2022, 611, 399–421. [Google Scholar] [CrossRef]
- Andradas, C.; Bröcker, L.; Ruiz, J.M. Constructible sets in real geometry; Vol. 33, Springer Science & Business Media, 1996.
- Marshall, M.A. Spaces of orderings and abstract real spectra; Lecture Notes in Mathematics 1636, Springer, 1996.
- Dickmann, M.; Petrovich, A. Real semigroups and abstract real spectra. I. Contemporary Mathematics 2004, 344, 99–120. [Google Scholar]
- Knus, M.A. Quadratic and Hermitian forms over rings; Vol. 294, Grundlehren der mathematischen Wissenschaften A Series of Comprehensive Studies in Mathematics, Springer-Verlag, 1991.
- Al Tahan, M.; Hoskova-Mayerova, S.; Davvaz, B. Some results on (generalized) fuzzy multi-Hv-ideals of Hv-rings. Symmetry 2019, 11, 1376. [Google Scholar] [CrossRef]
- Ameri, R.; Kordi, A.; Hoskova-Mayerova, S. Multiplicative hyperring of fractions and coprime hyperideals. Analele Universitatii" Ovidius" Constanta-Seria Matematica 2017, 25, 5–23. [Google Scholar] [CrossRef]
- Ameri, R.; Eyvazi, M.; Hoskova-Mayerova, S. Advanced results in enumeration of hyperfields. Aims Mathematics 2020, 5, 6552–6579. [Google Scholar] [CrossRef]
- Massouros, C.G. Theory of hyperrings and hyperfields. Algebra and Logic 1985, 24, 477–485. [Google Scholar] [CrossRef]
- Nakassis, A. Recent results in hyperring and hyperfield theory. International Journal of Mathematics and Mathematical Sciences 1988, 11. [Google Scholar] [CrossRef]
- Massouros, G.G.; Massouros, C.G. Homomorphic relation on hyperingoinds and join hyperrings. Ratio Mathematica 1999, 13, 61–70. [Google Scholar]
- Massouros, C.G.; Massouros, G.G. On join hyperrings. Proceedings of the 10th International Congress on Algebraic Hyperstructures and Applications, Brno, Czech Republic, 2009, pp. 203–215.
- Jun, J. Algebraic geometry over hyperrings. Advances in Mathematics 2018, 323, 142–192. [Google Scholar] [CrossRef]
- Viro, O. Hyperfields for Tropical Geometry I. Hyperfields and dequantization. arXiv preprint 2010, arXiv:1006.3034. [Google Scholar]
- de Andrade Roberto, K.M. Multirings and The Chamber of Secrets: relationships between abstract theories of quadratic forms. Master’s thesis, Universidade de São Paulo, 2019.
- de Andrade Roberto, K.M.; Mariano, H.L. On superrings of polynomials and algebraically closed multifields. Journal of Pure and Applied Logic 2022, 9, 419–444. [Google Scholar]
- Davvaz, B.; Salasi, A. A Realization of Hyperrings. Communications in Algebra 2006, 34, 4389–4400. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



