
Submitted:
07 December 2025
Posted:
09 December 2025
You are already at the latest version
Abstract
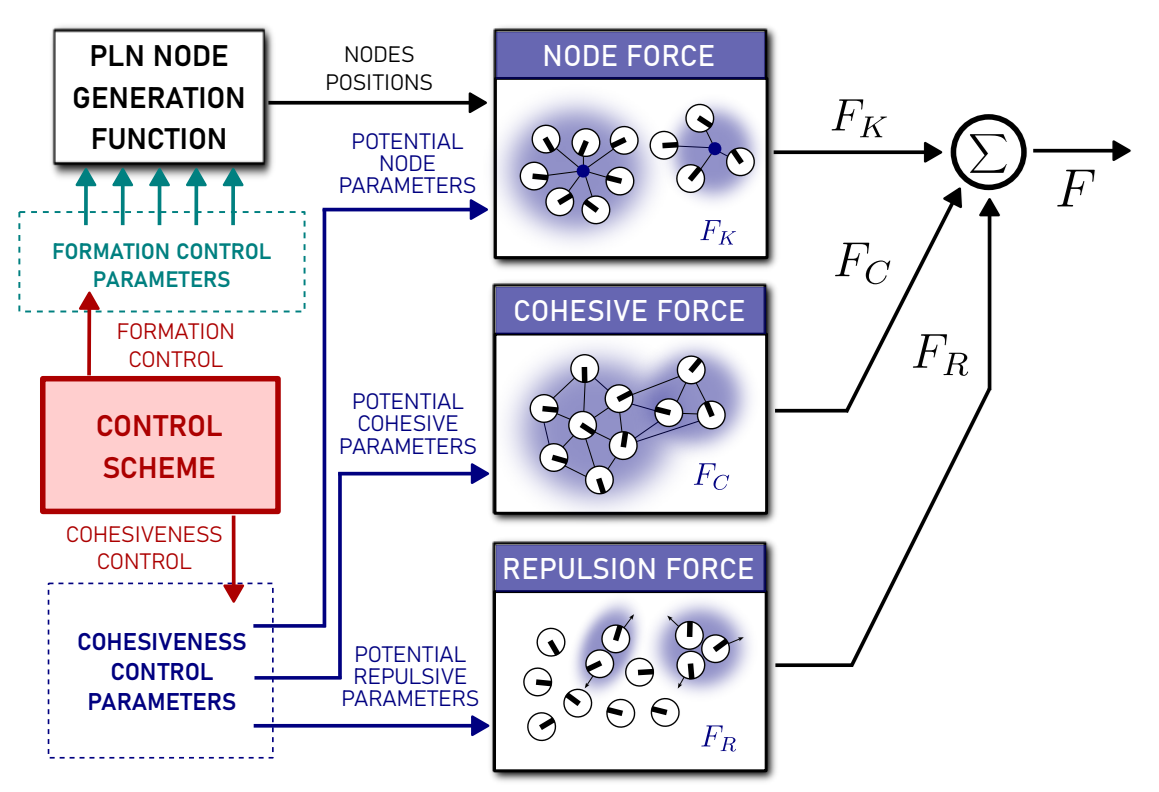
Accurately modeling and representing the collective dynamics of large-scale robotic systems remains one of the fundamental challenges in swarm robotics. Within the context of agricultural robotics, swarm-based coordination schemes enable scalable and adaptive control of multi-robot teams performing tasks such as crop monitoring, precision spraying, and autonomous field maintenance. For these applications, efficient modeling of both individual and collective robot dynamics is essential to achieve effective swarm coordination, ensuring an accurate representation of local interactions and emergent global behavior. This paper introduces a cohesive Potential Linked Nodes (PLN) framework, an adjustable formation structure that employs artificial potential fields (APFs) and virtual node-link interactions to regulate swarm cohesion and coordinated motion (CM). The proposed model governs swarm formation, modulates structural integrity, and enhances responsiveness to external perturbations such as uneven terrain and crop-induced obstacles. By interconnecting agricultural robots through a dynamically reconfigurable node-link topology, the PLN framework ensures decentralized stability while maintaining high cohesion and adaptability. The system’s tunable parameters enable online adjustment of inter-agent coupling strength and formation rigidity, allowing the swarm to adapt its configuration to varying environmental and operational constraints. Comprehensive simulation experiments were conducted to assess the performance of the cohesive PLN model under multiple swarm conditions, including static aggregation and dynamic flocking behavior using differential-drive mobile robots. Additional tests within a simulated cropping environment were performed to evaluate the framework’s stability and cohesiveness under realistic agricultural constraints. Swarm cohesion and formation stability were quantitatively analyzed using density-based and inter-robot distance metrics. The experimental results demonstrate that the PLN model effectively maintains formation integrity and cohesive stability throughout all scenarios, achieving coordinated coverage and motion adaptability suitable for precision agriculture applications.
Keywords:
robotic swarms
; coordinate motion
; artificial potential fields
; collective behavior
; aggregation
; flocking
; multi-robot agricultural systems
; mobile robotics
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



