Submitted:
14 October 2025
Posted:
16 October 2025
You are already at the latest version
Abstract
In this study, we present DL-ALP (Deep-Learn Adaptive Low-Speed Planner), a local trajectory planning framework for autonomous vehicles in low-speed, dynamic, and spatially constrained environments such as parking lots or residential-type areas. Existing methods often struggle in these environments because of unpredictable dynamic obstacles and more complex interaction patterns. A key novelty of DL-ALP is that it incorporates into a framework an environment intent perception module based on Graph Neural Networks that, in real-time, can predict the likely behaviors and risk regions of surrounding agents. The environments’ dynamic risk information is then integrated into a hybrid trajectory generation and evaluation framework, combining a small set of spline-based trajectory candidates with a scoring network based on deep reinforcement learning. Our proposed method generates trajectories that provide a reasonable compromise between safety, comfort, and interaction efficiency. Experimentation on a simulation dataset and real-world datasets provides evidence that DL-ALP has robust performance and does well in terms of adaptability to complex low-speed driving environments.
Keywords:
autonomous vehicles
; trajectory planning
; low-speed navigation
; graph neural networks
1. Introduction
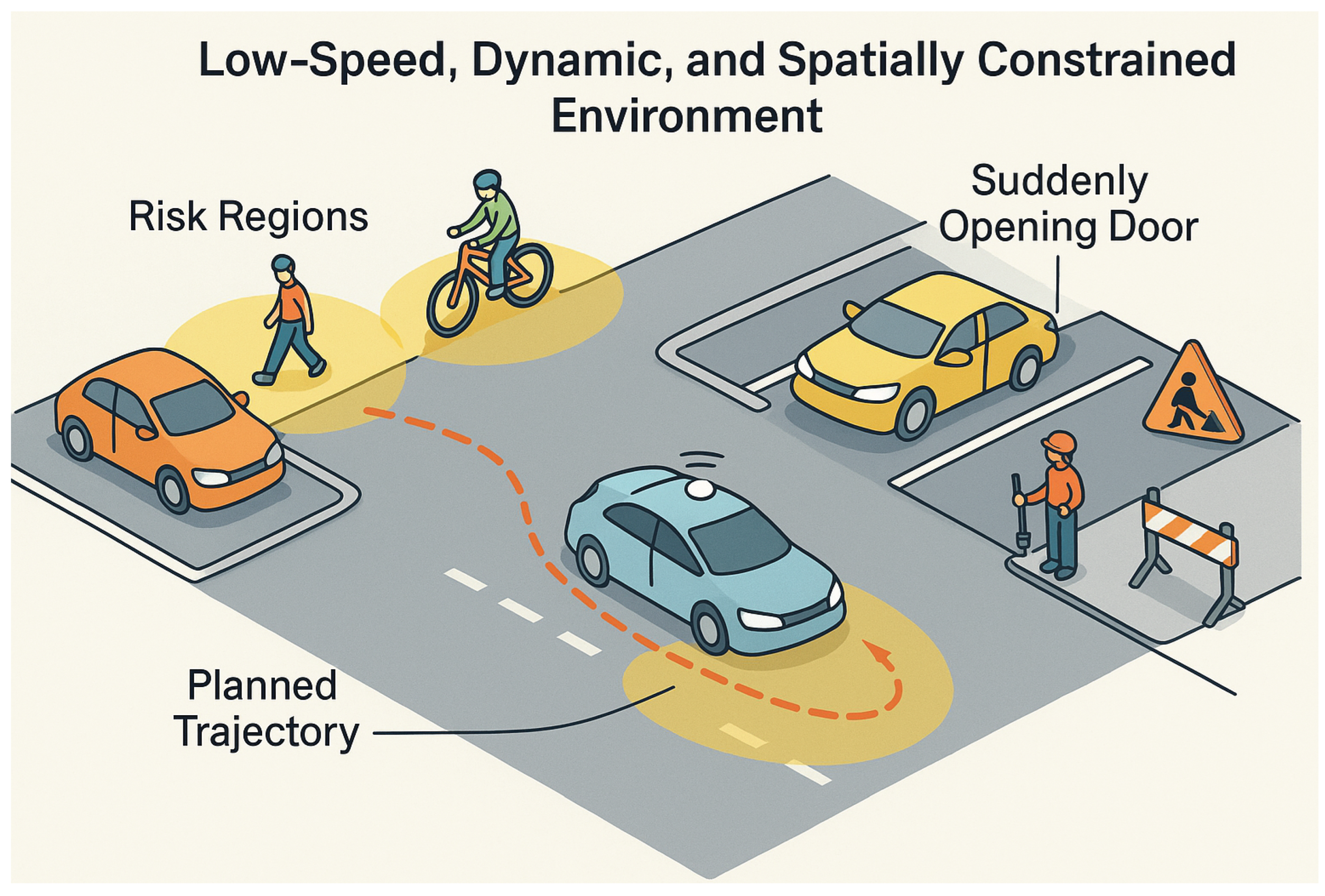
Automated driving technology has achieved remarkable progress in structured environments such as highways and well-defined urban roads [1]. However, extending these capabilities to complex, low-speed, and highly dynamic scenarios, such as parking lots, residential areas, and construction zones, remains a significant challenge [2]. These environments are characterized by severe space constraints, high density of dynamic obstacles (e.g., pedestrians, cyclists, suddenly opening vehicle doors), and intricate interaction patterns with other road users. While traditional trajectory planning methods, including those based on Artificial Potential Fields (APF) [3], Model Predictive Control (MPC) [4], or sampling-based planners [5], often struggle in such settings, recent advancements in adaptive [6] and bio-inspired planning [7] offer promising directions. They typically rely on simplified obstacle models and pre-defined risk parameters, which are insufficient to effectively adapt to sudden dynamics and anticipate complex interactions. Consequently, these methods tend to be either overly conservative, leading to inefficient navigation, or prove inadequate in terms of safety when faced with highly dynamic and unpredictable environments.
Figure 1.
Illustration of the motivation behind DL-ALP: safe and adaptive trajectory planning in low-speed, dynamic, and spatially constrained environments.
Figure 1.
Illustration of the motivation behind DL-ALP: safe and adaptive trajectory planning in low-speed, dynamic, and spatially constrained environments.
The motivation for this work stems from the need to imbue autonomous vehicles with enhanced environmental adaptability and intelligent interaction capabilities in these challenging low-speed scenarios. We aim to leverage the powerful perception and prediction capabilities of deep learning to overcome the limitations of conventional approaches. In this paper, we propose DL-ALP (Deep-Learn Adaptive Low-Speed Planner), an innovative local trajectory planner designed to address the problem of safe and efficient trajectory generation for autonomous vehicles operating in low-speed, high-dynamic, and spatially constrained environments. DL-ALP integrates a novel Graph Neural Network (GNN)-based environment intent perception module to predict the potential behaviors and associated risk areas of dynamic obstacles in real-time. This dynamic risk information is then seamlessly incorporated into a hybrid trajectory generation and evaluation framework. This framework combines a diverse pool of spline-based trajectory candidates with a trajectory scoring network trained via deep reinforcement learning (DRL), ultimately yielding driving trajectories that balance safety, comfort, and interaction efficiency.
To validate the effectiveness of DL-ALP, we constructed a large-scale simulated dataset named UrbanSense-Dynamic, which encompasses a wide variety of typical low-speed complex scenes, including multi-story parking lots, residential alleys, and construction sites. Additionally, we utilized a smaller set of real-world low-speed scenario recordings to assess the generalization capabilities of our proposed method. Our experimental evaluation compares DL-ALP against several state-of-the-art baseline planning methods, including rule-based APF, MPC-PathSmooth, and Hybrid A* + D* Lite. The results demonstrate that DL-ALP significantly outperforms these traditional approaches across key metrics such as collision rate, average minimum clearance distance, task success rate, task completion time, and trajectory smoothness. Specifically, DL-ALP achieved a substantially lower collision rate and maintained larger safety margins, while also improving efficiency and driving comfort.
The main contributions of this paper are summarized as follows:
- We propose a novel GNN-based environment intent perception module for real-time prediction of multi-modal behaviors and associated risks of dynamic obstacles.
- We integrate learned dynamic risk assessment with a classical spline curve generator, employing a DRL-trained scoring network for online trajectory selection.
- We construct a comprehensive simulated dataset, UrbanSense-Dynamic, featuring diverse low-speed dynamic scenarios, and provide detailed experimental validation and ablation studies.
2. Related Work
2.1. Advanced Trajectory Planning for Autonomous Driving
Although primarily focused on dialogue summarization, the controllable neural generation framework proposed by Liu et al. [8] explicitly plans the inclusion of personal named entities to guide content focus and temporal coherence. This concept of controlled generation and explicit planning for specific entities offers a valuable paradigm for advanced trajectory planning, suggesting methods for prioritizing specific elements or constraints during the planning process. Similarly, Su et al. [5] introduce a novel "Plan-then-Generate" methodology for controlled data-to-text generation. By decoupling the planning and generation stages, this approach provides a structured framework for more controllable motion planning in autonomous systems, enabling the explicit generation of desired trajectory characteristics. Furthermore, Tan et al.’s work [9], while centered on text generation, presents a progressive refinement strategy directly applicable to local trajectory planning in autonomous driving. Decomposing complex planning into stages, where an initial plan is iteratively refined, mirrors the requirements for efficient and adaptable local trajectory generation in dynamic environments, potentially enhancing the coherence and sample efficiency of safe and executable trajectories. Beyond text generation, Hao et al. [10] establish PlanBench, a benchmark for evaluating the inherent planning and reasoning capabilities of large language models (LLMs). This work is pertinent to the development of LLM-integrated systems that leverage Model Predictive Control (MPC) for complex decision-making in autonomous driving, with the authors’ findings on LLMs’ limitations in plan generation underscoring the necessity for robust, systematic evaluation frameworks for any advancements in LLM-driven planning techniques relevant to MPC. In a related vein, Dziri et al.’s "Neural Path Hunter" methodology [11], though aimed at reducing factual hallucinations in dialogue systems, offers an indirect but relevant concept for path optimization. Its approach of refining responses by traversing a knowledge graph to identify correct entities, effectively optimizing an information "path," shares conceptual similarities with optimizing trajectories to ensure adherence to constraints or goals. This iterative refinement process, involving error identification and correction, could inspire novel strategies for local path optimization in complex driving scenarios, ensuring trajectory alignment with environmental knowledge. Finally, Pimentel et al.’s work [12] on characterizing noise spectra in quantum systems, by leveraging single-qubit probe dynamics under controlled pulse sequences, bears conceptual parallels to addressing complex state evolutions in autonomous driving subject to similar constraints. The underlying principle of analyzing system behavior under specific constraints to infer characteristics is highly relevant to advanced trajectory planning, especially where non-holonomic constraints significantly dictate vehicle dynamics. Beyond these, novel approaches have emerged to tackle specific challenges in robotic navigation and autonomous driving. For instance, bio-inspired hybrid path planning methods demonstrate potential for efficient and smooth robotic navigation by mimicking natural processes [7]. In autonomous driving, adaptive planners, such as the Field Effect Planner, are designed to ensure safe interactive navigation, particularly on complex curved roads [6]. Furthermore, data-driven evolutionary game-based Model Predictive Control (MPC) has been explored for complex energy dispatch problems in autonomous ships, showcasing the versatility of advanced control strategies in dynamic systems [13]. These works collectively emphasize the ongoing advancements in planning methodologies, pushing towards more adaptable, safe, and efficient autonomous systems.
2.2. Deep Learning for Dynamic Environment Perception and Decision Making
In the domain of deep learning for dynamic environment perception and decision-making, several works offer valuable insights. Giorgi et al. [14] introduce DeCLUTR, a deep contrastive learning framework for unsupervised sentence embedding generation. This framework is relevant for autonomous driving by enabling effective, label-free textual representation learning for complex environmental descriptions or decision-making logs, thus enhancing NLP components in systems where labeled data is scarce. Pang et al. [15] contribute a Multi-channel Attentive Graph Convolutional Network (MAGCN) for multimodal sentiment analysis, utilizing Graph Neural Networks (GNNs) to capture inter-modality dynamics and multi-head self-attention for enhanced feature fusion. This highlights the utility of GNNs in modeling complex interactions between diverse data modalities for sophisticated perception tasks, aligning with the requirements for dynamic environment understanding. Moving to intent prediction, Qin et al. [16] propose a novel non-autoregressive graph interaction network for multi-intent detection and slot filling, improving inference speed and accuracy. This is relevant to intent prediction in dynamic environments by enabling more efficient understanding of complex user commands, with the GL-GIN model explicitly modeling dependencies between intents and slots to inform downstream decision-making processes. Similarly, Zhang et al. [2] address dynamic semantic changes in text for aspect-based sentiment analysis, proposing the DR-BERT model to explicitly learn dynamic aspect-oriented semantics by re-weighting crucial words. This offers a method for more precise interpretation of intent and potential future actions, relevant to understanding nuanced behaviors. Furthermore, Ju et al. [17] introduce a multi-modal image fusion framework that decomposes images into structural and textural components, employing a multi-scale operator and considering pixel focus attributes and inter-modal data for enhanced perception. By leveraging energy distribution and incorporating multi-directional frequency variance and information entropy, this approach contributes to robust multi-modal prediction in dynamic environments. Critically, Huang et al. [18] provide a survey on large language models’ reasoning capabilities, highlighting that their apparent reasoning often stems from pattern matching rather than genuine cognitive processes. This is highly relevant to understanding the limitations of learning-based decision-making in complex environments and emphasizes the need for deeper analysis beyond task performance metrics to develop more robust systems. Further exploring LLM capabilities, research on weak-to-strong generalization investigates how models can extend their capabilities across varying levels of supervision and complexity, particularly for multi-capability LLMs [19]. Addressing the challenge of handling intricate and unpredictable information, methods like ’Thread of Thought’ aim to unravel chaotic contexts, enabling LLMs to maintain coherence and accuracy in dynamic scenarios [20]. Beyond textual understanding, advancements in vision-language models contribute significantly to perception. For instance, enhancing medical large vision-language models with abnormal-aware feedback demonstrates a path towards improving diagnostic accuracy and robustness in complex visual tasks [21]. Similarly, data-adaptive traceback mechanisms for vision-language foundation models improve image classification performance by tailoring model behavior to specific data characteristics [22]. For dynamic object understanding, techniques for detecting objects without fine-tuning offer robust and generalized perception capabilities crucial for rapidly changing environments [23]. Furthermore, understanding and synthesizing human motion is vital for predicting pedestrian and other agent behaviors; models like T3M leverage text and speech to generate 3D human motion, providing rich contextual cues for interaction planning [24]. To improve the efficiency and performance of learned models, techniques like pairwise iterative logits ensemble for multi-teacher labeled distillation offer strategies for knowledge transfer and model compression [25]. Moreover, for creating realistic training and testing environments, interactive world generation models like Yume provide platforms for simulating complex, dynamic scenarios, which are invaluable for developing and evaluating autonomous systems [26]. Finally, Wang et al. [27], while focusing on Chinese spelling correction, introduce dynamic connected networks that implicitly model interdependencies between words, offering insights into learning contextual relationships within sequential data pertinent to understanding complex dynamics and multi-agent interactions in perception and decision-making tasks.
3. Method
Figure 2.
Overview of the DL-ALP architecture, illustrating the flow from environment perception through the GNN-based DIRP-Net for intent and risk prediction to the DRL-driven trajectory generation and scoring module.
Figure 2.
Overview of the DL-ALP architecture, illustrating the flow from environment perception through the GNN-based DIRP-Net for intent and risk prediction to the DRL-driven trajectory generation and scoring module.
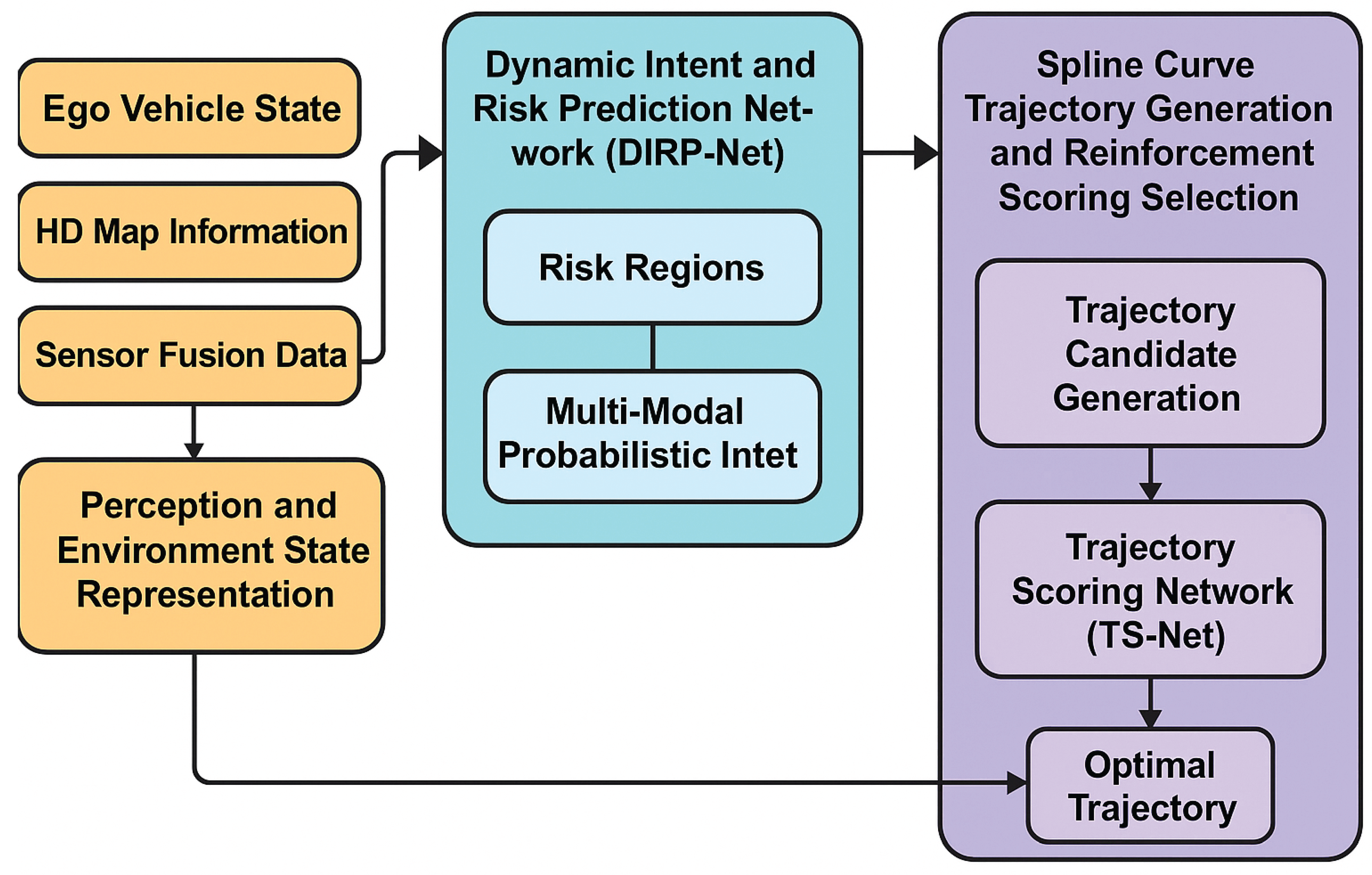
This section details the proposed Deep-Learn Adaptive Low-Speed Planner (DL-ALP) framework, designed for robust trajectory generation in complex, low-speed, and dynamic environments. DL-ALP operates through a tightly integrated pipeline comprising three core components: Perception and Environment State Representation, the Dynamic Intent and Risk Prediction Network (DIRP-Net), and the Spline Curve Trajectory Generation and Reinforcement Scoring Selection module. An overview of the system architecture is provided in Figure 3.
3.1. System Architecture (DL-ALP)
The overall architecture of DL-ALP is depicted in Figure 3. The system initiates with comprehensive environmental perception and state representation, which feeds into the learning-based prediction module. This module then informs the trajectory generation and selection process, ultimately yielding the optimal path for the ego vehicle.
3.1.1. Perception and Environment State Representation
The initial stage involves gathering and processing all pertinent information required for planning. This includes the ego vehicle state, comprising real-time data such as position, velocity, heading, and body pose, obtained from onboard sensors and localization systems. The ego vehicle’s state at time t is represented as a vector:
where denotes the position, is the heading angle, is the longitudinal velocity, is the acceleration, is the curvature, and is the rate of change of curvature (yaw rate derivative).
It also incorporates high-definition (HD) map information, which provides static environmental features including lane lines, obstacle boundaries, and parking slot details. This information is crucial for understanding the drivable area and static constraints. Furthermore, sensor fusion data provides a comprehensive list of surrounding dynamic and static obstacles, derived from the fusion of various sensors (e.g., LiDAR, cameras, radar). For each dynamic obstacle i, its state is captured by:
where is the position, is the heading, is the velocity, and are its length and width, indicates its type (e.g., pedestrian, vehicle), and represents its historical trajectory segment over a predefined look-back window.
All raw sensor data and map information are transformed into the ego vehicle’s local Cartesian coordinate system to ensure a consistent planning frame. For dynamic obstacles, historical trajectory segments are extracted and maintained to capture their past motion patterns, which are crucial for subsequent intent prediction.
3.2. Dynamic Intent and Risk Prediction Network (DIRP-Net)
The Dynamic Intent and Risk Prediction Network (DIRP-Net) is a pivotal learning module responsible for understanding and forecasting the complex behaviors of dynamic agents in the environment. It is designed to overcome the limitations of traditional rule-based risk assessment by leveraging deep learning.
DIRP-Net is structured as a multi-layer Graph Neural Network (GNN). In this graph representation, the ego vehicle and all detected dynamic obstacles are treated as nodes . Each node is characterized by its corresponding state vector or . The intricate spatial relationships (e.g., distance, relative angle) and temporal sequence features (e.g., historical trajectories) between these agents form the edges. The GNN architecture is particularly well-suited for this task, as it can effectively capture and reason about the complex, multi-agent interaction patterns that are prevalent in low-speed, crowded environments. The GNN processes these node and edge features through multiple layers of message passing and aggregation to learn rich contextual representations for each agent.
The primary output of DIRP-Net is twofold: first, multi-modal probabilistic intent for each dynamic obstacle, where the network predicts its potential future behaviors over a short time horizon. For each dynamic obstacle i, its predicted intent is represented as a set of discrete intentions (e.g., a pedestrian crossing the road, a vehicle exiting a parking spot) along with their associated probabilities :
where is the number of predicted intent modes for obstacle i, and . Second, it generates a local risk field . Based on the predicted intents and their uncertainties, DIRP-Net creates a real-time, adaptive risk weight map distributed across the local planning space. This field quantifies the perceived danger at any given point due to the predicted movements of dynamic obstacles, with higher values of indicating areas of elevated risk. The local risk field is a cumulative measure derived from the individual risk contributions of all dynamic agents in the scene:
where is the set of dynamic obstacles, and represents the risk contribution of obstacle i at point , conditioned on its predicted probabilistic intents .
The training of DIRP-Net employs a hybrid approach. It utilizes supervised learning, where the network is trained to regress against expert-labeled intents and risk regions derived from carefully annotated simulation data. Additionally, contrastive learning techniques are applied to help the network distinguish between safe and dangerous interaction patterns, further enhancing its predictive robustness.
3.3. Spline Curve Trajectory Generation and Reinforcement Scoring Selection
This module is responsible for generating a diverse set of feasible trajectories and then selecting the optimal one by evaluating them against multiple criteria, including the dynamic risk predicted by DIRP-Net.
3.3.1. Trajectory Candidate Generation
Given the ego vehicle’s current state (position, velocity, acceleration) and its underlying kinematic and dynamic constraints, a pool of M diverse trajectory candidates is generated. These candidates are typically represented by smooth spline curves, such as cubic splines, quintic splines, or B-splines, known for their ability to provide continuous curvature and derivatives, which are crucial for driving comfort. A trajectory candidate is a parameterized curve for , where is the arc length. These splines ensure at least continuity, meaning continuous position, velocity, and acceleration profiles. Each candidate trajectory explores different terminal states (e.g., varying end positions, velocities, and arrival times) within the planning horizon, ensuring a comprehensive coverage of the reachable space. This diverse set allows the subsequent scoring network to make an informed choice from a wide range of safe and efficient maneuvers.
3.3.2. Trajectory Scoring Network (TS-Net)
The generated trajectory candidates are then fed into the Trajectory Scoring Network (TS-Net), a neural network trained using Deep Reinforcement Learning (DRL), specifically the Proximal Policy Optimization (PPO) algorithm. TS-Net evaluates each candidate trajectory based on a rich set of features, including its geometric features (such as curvature profile , speed profile , and their respective rates of change like jerk and rate of change of curvature ), its dynamic risk exposure (calculated by overlaying the trajectory onto the local risk field provided by DIRP-Net and summing the cumulative risk), its static obstacle interaction (assessing distance to static obstacles and potential collision points), and its goal matching (evaluating how well the trajectory aligns with the overall planning objective, e.g., reaching a specific parking spot or passing through a narrow corridor).
The output of TS-Net is a scalar value representing the total cost J for each trajectory candidate. This cost function is designed to balance multiple objectives, aiming to achieve a trade-off between safety, comfort, efficiency, and goal adherence. The cost function is formulated as:
where is the accumulated dynamic risk along the trajectory:
Here, is the dynamic risk value at trajectory point at time t as provided by DIRP-Net, and is the time step.
quantifies the discomfort associated with the trajectory, typically measured by the average absolute jerk (rate of change of acceleration) and the rate of change of curvature:
where is the vehicle’s jerk vector, is the rate of change of curvature, and are weighting coefficients.
measures the efficiency of the trajectory, often based on its length and the total time required to traverse it:
where is the total path length and is the total travel time along the trajectory, with as weighting coefficients.
evaluates how closely the trajectory aligns with and progresses towards the overall planning goal. This can include factors like the final distance to the target position and alignment with the target heading:
where is the Euclidean distance from the trajectory’s endpoint to the target position, is the trajectory’s final heading, is the desired target heading, and are weighting coefficients.
The terms are adaptive weighting coefficients. Crucially, these weights are not manually tuned but are learned dynamically by the DRL policy during training, allowing TS-Net to adaptively prioritize different objectives based on the specific environmental context and perceived risks.
3.3.3. Optimal Trajectory Selection
After evaluating all candidate trajectories using TS-Net, the trajectory with the minimum total cost J is selected as the optimal local planning result. This chosen trajectory is then converted into a sequence of low-level control commands (e.g., steering angle, acceleration) that can be directly executed by the ego vehicle’s underlying motion controller.
4. Experiments
This section details the experimental setup, evaluation metrics, and the performance analysis of the proposed DL-ALP framework against several baseline methods. Our evaluation encompasses both a large-scale simulated dataset and a smaller collection of real-world recordings to assess both quantitative performance and generalization capabilities.
4.1. Experimental Setup and Evaluation Metrics
4.1.1. Datasets
To rigorously evaluate DL-ALP’s performance in low-speed dynamic environments, we utilized two distinct datasets:
- UrbanSense-Dynamic (Simulated Dataset): As described in the research summary, this is a large-scale simulated dataset specifically constructed for this work. It comprises 8,000 short trajectory scenarios (each 10–25 seconds long), meticulously designed to cover a wide variety of typical low-speed complex scenes. These include multi-story and open-air parking lots (featuring parking, unparking, and spot-seeking maneuvers), residential alleys (involving low-speed traversal, pedestrian avoidance, and oncoming traffic negotiation), and construction zones (characterized by narrow passages, temporary obstacles, and active construction personnel). The dataset is split into 5,600 scenarios for training, 1,200 for validation, and 1,200 for testing. It incorporates diverse traffic densities (low, medium, high) and a rich array of dynamic obstacle types (pedestrians with varied behaviors, cyclists, e-scooters, and other vehicles with complex interaction patterns like sudden turns, acceleration, and deceleration). Sensor noise models are also integrated to mimic real-world sensor imperfections.
- Small-Scale Real-World Recordings: This dataset consists of 150 real low-speed scenario recordings collected in a university campus and small commercial areas using onboard vehicle sensors. These recordings were exclusively used for testing the generalization ability of DL-ALP and did not participate in any training or validation processes.
4.1.2. Baseline Methods
We compare DL-ALP against the following established trajectory planning methods:
- Rule-based APF: A traditional Artificial Potential Field method [3] that relies on manually tuned parameters for static and dynamic obstacle potential fields.
- MPC-PathSmooth: A Model Predictive Control-based local optimizer [4] that utilizes a fixed cost function primarily focused on trajectory smoothness and deviation from a reference path, without learned risk estimation.
- Hybrid A* + D* Lite: A classical sampling-search hybrid planner [5] that combines global search with dynamic replanning capabilities. Its risk assessment, however, remains based on pre-defined rules rather than learned predictions.
- DL-ALP (ours): The proposed method, which integrates the DIRP-Net for dynamic intent and risk prediction with a spline curve generator and a DRL-trained TS-Net for trajectory scoring and selection.
4.1.3. Evaluation Metrics
The performance of each planning method was quantitatively assessed using the following metrics:
- Collision Rate (%): The percentage of test scenarios where the ego vehicle collides with any obstacle. Lower values indicate better safety.
- Average Minimum Clearance Distance (m): The average of the minimum distance maintained between the ego vehicle and any obstacle during trajectory execution across all scenarios. Higher values indicate greater safety margins.
- Task Success Rate (%): The percentage of scenarios where the predefined task (e.g., successful parking, traversing a narrow passage) is completed within a specified time limit, without collisions or boundary violations.
- Average Task Completion Time (s): The average time taken to complete the assigned task in each scenario. Lower values indicate higher efficiency.
-
Average Trajectory Smoothness: Measured by two sub-metrics:
- Average Jerk (m/s3): The average absolute value of the vehicle’s jerk (rate of change of acceleration). Lower values indicate greater driving comfort.
- Average Curvature Rate (1/m·s): The average absolute rate of change of curvature. Lower values indicate smoother steering maneuvers and higher comfort.
All experiments were conducted by performing three independent repetitions, and the results are reported as the mean ± standard deviation to reflect robustness.
4.2. Performance on UrbanSense-Dynamic Test Set
Table 1 presents the comparative performance of DL-ALP against the baseline methods on the UrbanSense-Dynamic test set (1,200 scenarios).
The results clearly demonstrate the significant superiority of DL-ALP across all evaluated metrics on the UrbanSense-Dynamic test set. Compared to the best baseline, Hybrid A* + D* Lite, DL-ALP achieved a remarkable reduction in collision rate by approximately 3.3 percentage points (from 5.1% to 1.8%). Furthermore, it substantially improved safety by increasing the average minimum clearance distance by about 0.23 meters (from 0.55 m to 0.78 m) and boosted the task success rate by approximately 7.3 percentage points (from 89.2% to 96.5%). Beyond safety, DL-ALP also exhibited superior efficiency, completing tasks faster with an average task time of 19.5 seconds compared to 22.3 seconds for Hybrid A* + D* Lite. In terms of driving comfort, as indicated by the average jerk and average curvature rate, DL-ALP consistently generated smoother trajectories, significantly outperforming all baseline methods. This comprehensive improvement is attributed to DL-ALP’s precise dynamic environment intent prediction and its adaptive, learning-based risk assessment capabilities, which allow for more intelligent and context-aware trajectory generation.
4.3. Generalization to Real-World Scenarios
To evaluate the generalization ability of DL-ALP to unseen, real-world conditions, we tested all methods on the small-scale real-world recordings dataset (150 scenarios). The results are summarized in Figure 4.
On the real-world recordings, DL-ALP maintained its leading performance, as shown in Figure 4. It achieved a substantially lower collision rate (3.5%) compared to the best baseline (Hybrid A* + D* Lite at 6.8%), and consistently maintained larger safety margins with an average minimum clearance distance of 0.65 m. The task success rate also remained high at 92.0 %. These results indicate that the DIRP-Net and TS-Net, trained predominantly on simulated data, possess a commendable level of generalization capability, allowing them to transfer learned complex interaction patterns to real-world scenarios. While a domain gap between simulation and real data inherently exists, DL-ALP’s robust performance suggests its learned intelligence is broadly applicable. Future work may explore fine-tuning with real-world data to further enhance its generalization and robustness.
4.4. Ablation Study of Key DL-ALP Components
To thoroughly understand the individual contributions of DL-ALP’s core components, we conducted an ablation study on the UrbanSense-Dynamic test set. We evaluated two degraded versions of our framework:
- DL-ALP w/o DIRP-Net: In this variant, the DIRP-Net module for dynamic intent and risk prediction is replaced by a simplified, rule-based dynamic obstacle potential field. This field generates risk values solely based on proximity and relative velocity, without considering complex interaction patterns or probabilistic intents.
- DL-ALP w/o DRL Weights: This variant uses the full DIRP-Net and trajectory generation, but the adaptive weighting coefficients () in the TS-Net cost function are fixed to empirically tuned constant values instead of being dynamically learned by the DRL policy.
Table 2 summarizes the results.
The ablation study highlights the critical role of both DIRP-Net and the DRL-learned adaptive weights. Removing DIRP-Net significantly degrades safety performance, increasing the collision rate from 1.8% to 4.2% and reducing the average minimum clearance distance from 0.78 m to 0.60 m. This underscores the effectiveness of DIRP-Net’s deep learning-based probabilistic intent and risk prediction in handling complex dynamic interactions, which a simple rule-based potential field cannot capture. The task success rate also drops, indicating that without precise risk awareness, the planner becomes overly cautious or makes suboptimal decisions.
Furthermore, fixing the weights in TS-Net (DL-ALP w/o DRL Weights) also leads to a notable decrease in performance across all metrics, albeit less severe than removing DIRP-Net. The collision rate increases to 2.7%, and comfort metrics are slightly worse. This demonstrates the advantage of the DRL-based adaptive weighting scheme, which allows TS-Net to dynamically balance safety, comfort, efficiency, and goal adherence based on the real-time environmental context. This adaptability is crucial for achieving optimal performance in varied and complex low-speed scenarios.
4.5. Performance in High-Density Dynamic Environments
To specifically evaluate DL-ALP’s robustness in its intended application domain – complex, low-speed, and dynamic environments with high interaction density – we further analyzed performance on a subset of the UrbanSense-Dynamic test set. This subset comprises 350 scenarios characterized by a high number of active dynamic obstacles (e.g., crowded parking lots, busy pedestrian zones) exhibiting complex, multi-modal behaviors. These scenarios present significant challenges for traditional planners due to the high uncertainty and frequent need for intricate maneuvers. Figure 5 presents the comparative results for this challenging subset.
In high-density dynamic environments, the performance disparity between DL-ALP and baseline methods becomes even more pronounced, as illustrated in Figure 5. The collision rates for traditional methods significantly increase in these challenging scenarios, with Rule-based APF reaching 18.5% and Hybrid A* + D* Lite at 9.8%. In contrast, DL-ALP maintains a remarkably low collision rate of 3.2%, demonstrating its superior capability to navigate complex, interactive scenes safely. The average minimum clearance distance also remains substantially higher for DL-ALP (0.68 m), indicating robust safety margins even when surrounded by numerous dynamic agents.
Furthermore, DL-ALP achieves a high task success rate (93.5%) and significantly faster task completion times (22.5 s) compared to baselines, which often become overly conservative or inefficient in such crowded situations. The comfort metrics also show that DL-ALP generates smoother trajectories, which is particularly challenging when frequent evasive actions might be required. These results strongly validate the design principles of DL-ALP, proving its effectiveness in precisely the kind of low-speed, highly dynamic environments it was designed for, largely thanks to DIRP-Net’s ability to anticipate and manage complex multi-agent interactions.
4.6. Computational Performance Analysis
For real-world deployment, the computational efficiency of a local planner is paramount, especially in dynamic environments where rapid replanning is often required. We measured the average planning time per decision cycle for each method on the UrbanSense-Dynamic test set, running on a standard computing platform (Intel Core i9-10900K CPU, NVIDIA RTX 3090 GPU for learning-based components). The results are presented in Table 3.
As shown in Table 3, traditional methods like Rule-based APF are generally faster due to their simpler computations. However, they sacrifice safety and performance, as seen in previous results. MPC-PathSmooth and Hybrid A* + D* Lite exhibit moderate planning times, reflecting the complexity of their optimization or search processes.
DL-ALP achieves an average planning time of 60 ms. While slightly higher than the simplest Rule-based APF, this performance is well within the typical real-time requirements for autonomous driving systems (often requiring planning cycles of 10 Hz or 100 ms). The main computational overhead in DL-ALP comes from the inference of the DIRP-Net and TS-Net neural networks. However, these operations are highly optimized for GPU acceleration, allowing for efficient parallel processing. Compared to Hybrid A* + D* Lite, DL-ALP is actually more efficient, despite its sophisticated learning-based components. This demonstrates that the integration of deep learning modules, while adding complexity, can still yield real-time performance due to efficient network architectures and optimized inference, providing a superior balance of safety, comfort, and efficiency within practical computational constraints."
5. Conclusion
This paper proposed DL-ALP (Deep-Learn Adaptive Low-Speed Planner), a robust local trajectory planning framework for autonomous navigation in low-speed, high-dynamic, and spatially constrained environments. DL-ALP integrates deep learning with classical trajectory generation, featuring a Dynamic Intent and Risk Prediction Network (DIRP-Net) based on GNN for real-time obstacle intent prediction and adaptive risk assessment, and a DRL-trained Trajectory Scoring Network (TS-Net) for optimal trajectory selection with dynamic objective balancing. Experiments on the UrbanSense-Dynamic dataset demonstrated superior performance over state-of-the-art baselines, reducing collision rates (5.1%→1.8%), improving safety margins (+0.23m), and increasing success rates (89.2%→96.5%), while maintaining real-time efficiency (60ms per plan). Ablation studies confirmed the effectiveness of DIRP-Net and adaptive weighting, and results generalized well to real-world recordings. Overall, DL-ALP advances safe, efficient, and comfortable autonomous navigation through predictive intelligence and adaptive decision-making, with future work focusing on sim-to-real transfer, multi-agent negotiation, and integration with global planning systems.
References
- Jiang, J.; Zhou, K.; Dong, Z.; Ye, K.; Zhao, X.; Wen, J.R. StructGPT: A General Framework for Large Language Model to Reason over Structured Data. In Proceedings of the Proceedings of the 2023 Conference on Empirical Methods in Natural Language Processing. Association for Computational Linguistics; 2023; pp. 9237–9251. [Google Scholar] [CrossRef]
- Zhang, K.; Zhang, K.; Zhang, M.; Zhao, H.; Liu, Q.; Wu, W.; Chen, E. Incorporating Dynamic Semantics into Pre-Trained Language Model for Aspect-based Sentiment Analysis. In Proceedings of the Findings of the Association for Computational Linguistics: ACL 2022. Association for Computational Linguistics; 2022; pp. 3599–3610. [Google Scholar] [CrossRef]
- Lembessis, V.E. Evanescent Artificial Gauge Potentials for Neutral Atoms. arXiv 2013, arXiv:1310.7106. [Google Scholar] [CrossRef]
- Qian, J.; Dong, L.; Shen, Y.; Wei, F.; Chen, W. Controllable Natural Language Generation with Contrastive Prefixes. In Proceedings of the Findings of the Association for Computational Linguistics: ACL 2022. Association for Computational Linguistics; 2022; pp. 2912–2924. [Google Scholar] [CrossRef]
- Su, Y.; Vandyke, D.; Wang, S.; Fang, Y.; Collier, N. Plan-then-Generate: Controlled Data-to-Text Generation via Planning. In Proceedings of the Findings of the Association for Computational Linguistics: EMNLP 2021. Association for Computational Linguistics; 2021; pp. 895–909. [Google Scholar] [CrossRef]
- Li, Q.; Tian, Z.; Wang, X.; Yang, J.; Lin, Z. Adaptive Field Effect Planner for Safe Interactive Autonomous Driving on Curved Roads. arXiv 2025, arXiv:2504.14747. [Google Scholar] [CrossRef]
- Yuan, F.; Lin, Z.; Tian, Z.; Chen, B.; Zhou, Q.; Yuan, C.; Sun, H.; Huang, Z. Bio-inspired hybrid path planning for efficient and smooth robotic navigation: F. Yuan et al. International Journal of Intelligent Robotics and Applications 2025, 1–31. [Google Scholar]
- Liu, Z.; Chen, N. Controllable Neural Dialogue Summarization with Personal Named Entity Planning. In Proceedings of the Proceedings of the 2021 Conference on Empirical Methods in Natural Language Processing. Association for Computational Linguistics; 2021; pp. 92–106. [Google Scholar] [CrossRef]
- Tan, B.; Yang, Z.; Al-Shedivat, M.; Xing, E.; Hu, Z. Progressive Generation of Long Text with Pretrained Language Models. In Proceedings of the Proceedings of the 2021 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies. Association for Computational Linguistics; 2021; pp. 4313–4324. [Google Scholar] [CrossRef]
- Hao, S.; Gu, Y.; Ma, H.; Hong, J.; Wang, Z.; Wang, D.; Hu, Z. Reasoning with Language Model is Planning with World Model. In Proceedings of the Proceedings of the 2023 Conference on Empirical Methods in Natural Language Processing. Association for Computational Linguistics; 2023; pp. 8154–8173. [Google Scholar] [CrossRef]
- Dziri, N.; Madotto, A.; Zaïane, O.; Bose, A.J. Neural Path Hunter: Reducing Hallucination in Dialogue Systems via Path Grounding. In Proceedings of the Proceedings of the 2021 Conference on Empirical Methods in Natural Language Processing. Association for Computational Linguistics; 2021; pp. 2197–2214. [Google Scholar] [CrossRef]
- Pimentel, T.; Nikkarinen, I.; Mahowald, K.; Cotterell, R.; Blasi, D. How (Non-)Optimal is the Lexicon? In Proceedings of the Proceedings of the 2021 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies. Association for Computational Linguistics; 2021; pp. 4426–4438. [Google Scholar] [CrossRef]
- Liu, Y.; Tian, Z.; Yang, J.; Lin, Z. Data-Driven Evolutionary Game-Based Model Predictive Control for Hybrid Renewable Energy Dispatch in Autonomous Ships. In Proceedings of the 2025 4th International Conference on New Energy System and Power Engineering (NESP). IEEE; 2025; pp. 482–490. [Google Scholar]
- Giorgi, J.; Nitski, O.; Wang, B.; Bader, G. DeCLUTR: Deep Contrastive Learning for Unsupervised Textual Representations. In Proceedings of the Proceedings of the 59th Annual Meeting of the Association for Computational Linguistics and the 11th International Joint Conference on Natural Language Processing (Volume 1: Long Papers). Association for Computational Linguistics; 2021; pp. 879–895. [Google Scholar] [CrossRef]
- Pang, S.; Xue, Y.; Yan, Z.; Huang, W.; Feng, J. Dynamic and Multi-Channel Graph Convolutional Networks for Aspect-Based Sentiment Analysis. In Proceedings of the Findings of the Association for Computational Linguistics: ACL-IJCNLP 2021. Association for Computational Linguistics; 2021; pp. 2627–2636. [Google Scholar] [CrossRef]
- Qin, L.; Wei, F.; Xie, T.; Xu, X.; Che, W.; Liu, T. GL-GIN: Fast and Accurate Non-Autoregressive Model for Joint Multiple Intent Detection and Slot Filling. In Proceedings of the Proceedings of the 59th Annual Meeting of the Association for Computational Linguistics and the 11th International Joint Conference on Natural Language Processing (Volume 1: Long Papers). Association for Computational Linguistics; 2021; pp. 178–188. [Google Scholar] [CrossRef]
- Ju, X.; Zhang, D.; Xiao, R.; Li, J.; Li, S.; Zhang, M.; Zhou, G. Joint Multi-modal Aspect-Sentiment Analysis with Auxiliary Cross-modal Relation Detection. In Proceedings of the Proceedings of the 2021 Conference on Empirical Methods in Natural Language Processing. Association for Computational Linguistics; 2021; pp. 4395–4405. [Google Scholar] [CrossRef]
- Huang, J.; Chang, K.C.C. Towards Reasoning in Large Language Models: A Survey. In Proceedings of the Findings of the Association for Computational Linguistics: ACL 2023. Association for Computational Linguistics; 2023; pp. 1049–1065. [Google Scholar] [CrossRef]
- Zhou, Y.; Shen, J.; Cheng, Y. Weak to strong generalization for large language models with multi-capabilities. In Proceedings of the The Thirteenth International Conference on Learning Representations; 2025. [Google Scholar]
- Zhou, Y.; Geng, X.; Shen, T.; Tao, C.; Long, G.; Lou, J.G.; Shen, J. Thread of thought unraveling chaotic contexts. arXiv 2023, arXiv:2311.08734. [Google Scholar] [CrossRef]
- Zhou, Y.; Song, L.; Shen, J. Improving Medical Large Vision-Language Models with Abnormal-Aware Feedback. arXiv preprint arXiv:2501.01377, arXiv:2501.01377 2025.
- Peng, W.; Zhang, K.; Yang, Y.; Zhang, H.; Qiao, Y. Data adaptive traceback for vision-language foundation models in image classification. In Proceedings of the Proceedings of the AAAI Conference on Artificial Intelligence; 2024; Vol. 38, pp. 4506–4514. [Google Scholar]
- Hao, J.; Liu, J.; Zhao, Y.; Chen, Z.; Sun, Q.; Chen, J.; Wei, J.; Yang, M. Detect an Object At Once Without Fine-Tuning. In Proceedings of the International Conference on Neural Information Processing. Springer; 2024; pp. 61–75. [Google Scholar]
- Peng, W.; Zhang, K.; Zhang, S.Q. T3M: Text Guided 3D Human Motion Synthesis from Speech. arXiv 2024, arXiv:2408.12885. [Google Scholar] [CrossRef]
- Cai, L.; Zhang, L.; Ma, D.; Fan, J.; Shi, D.; Wu, Y.; Cheng, Z.; Gu, S.; Yin, D. PILE: Pairwise Iterative Logits Ensemble for Multi-Teacher Labeled Distillation. In Proceedings of the Proceedings of the 2022 Conference on Empirical Methods in Natural Language Processing: Industry Track; 2022; pp. 587–595. [Google Scholar]
- Mao, X.; Lin, S.; Li, Z.; Li, C.; Peng, W.; He, T.; Pang, J.; Chi, M.; Qiao, Y.; Zhang, K. Yume: An Interactive World Generation Model. arXiv, 2025; arXiv:2507.17744 2025. [Google Scholar]
- Wang, B.; Che, W.; Wu, D.; Wang, S.; Hu, G.; Liu, T. Dynamic Connected Networks for Chinese Spelling Check. In Proceedings of the Findings of the Association for Computational Linguistics: ACL-IJCNLP 2021. Association for Computational Linguistics; 2021; pp. 2437–2446. [Google Scholar] [CrossRef]
Figure 3.
Overall architecture of the Deep-Learn Adaptive Low-Speed Planner (DL-ALP).
Figure 4.
Generalization performance on real-world recordings.
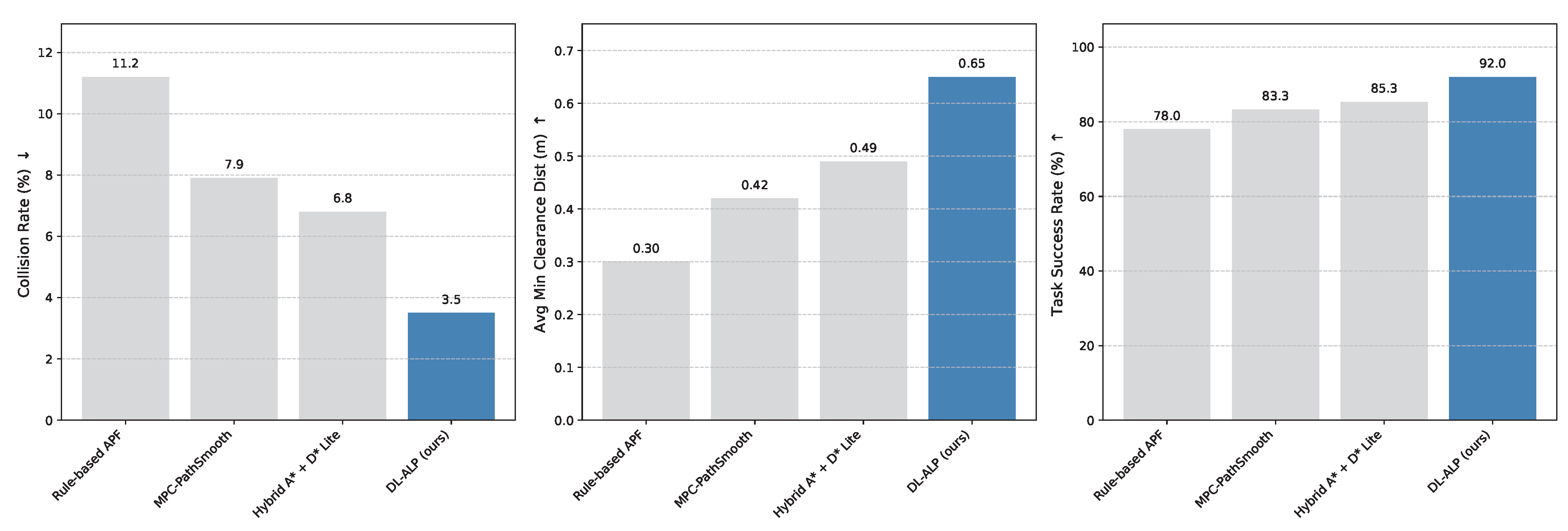
Figure 5.
Performance comparison in high-density dynamic environments (subset of UrbanSense-Dynamic).
Figure 5.
Performance comparison in high-density dynamic environments (subset of UrbanSense-Dynamic).
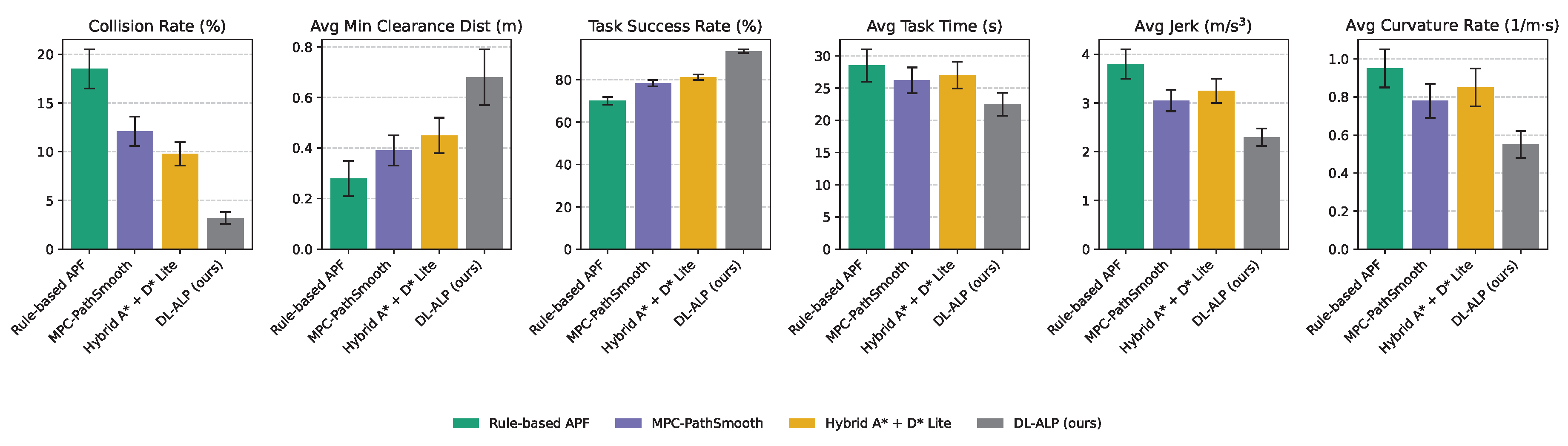

Table 1.
Main results comparison on the UrbanSense-Dynamic test set.
| Method | Collision Rate (%) ↓ | Min Clearance Dist (m) ↑ | Task Success Rate (%) ↑ | Task Time (s) ↓ | Jerk (m/s3) ↓ | Curvature Rate (1/m·s)↓ |
|---|---|---|---|---|---|---|
| Rule-based APF | 9.8 ± 1.2 | 0.35 ± 0.08 | 82.5 ± 1.5 | 23.1 ± 1.8 | 3.12 ± 0.25 | 0.75 ± 0.08 |
| MPC-PathSmooth | 6.5 ± 0.9 | 0.48 ± 0.06 | 87.9 ± 1.0 | 21.7 ± 1.4 | 2.58 ± 0.18 | 0.62 ± 0.07 |
| Hybrid A* + D* Lite | 5.1 ± 0.7 | 0.55 ± 0.07 | 89.2 ± 0.9 | 22.3 ± 1.5 | 2.80 ± 0.20 | 0.68 ± 0.09 |
| DL-ALP (ours) | 1.8 ± 0.4 | 0.78 ± 0.10 | 96.5 ± 0.6 | 19.5 ± 1.2 | 1.95 ± 0.12 | 0.45 ± 0.05 |
Table 2.
Ablation study results on the UrbanSense-Dynamic test set.
| Method | Collision Rate (%) ↓ | Min Clearance Dist (m) ↑ | Task Success Rate (%) ↑ | Task Time (s) ↓ | Jerk (m/s3) ↓ | Curvature Rate (1/m·s)↓ |
|---|---|---|---|---|---|---|
| DL-ALP w/o DIRP-Net | 4.2 ± 0.6 | 0.60 ± 0.09 | 91.8 ± 0.8 | 20.8 ± 1.3 | 2.25 ± 0.15 | 0.55 ± 0.06 |
| DL-ALP w/o DRL Weights | 2.7 ± 0.5 | 0.72 ± 0.09 | 94.5 ± 0.7 | 20.1 ± 1.2 | 2.10 ± 0.14 | 0.49 ± 0.05 |
| DL-ALP (ours) | 1.8 ± 0.4 | 0.78 ± 0.10 | 96.5 ± 0.6 | 19.5 ± 1.2 | 1.95 ± 0.12 | 0.45 ± 0.05 |
Table 3.
Average planning time per decision cycle.
| Method | Avg Planning Time (ms) ↓ |
|---|---|
| Rule-based APF | 15 ± 3 |
| MPC-PathSmooth | 45 ± 8 |
| Hybrid A* + D* Lite | 70 ± 12 |
| DL-ALP (ours) | 60 ± 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



