
Submitted:
29 September 2025
Posted:
06 October 2025
You are already at the latest version
Abstract
A reinforced concrete (RC) moment-resisting frame (MRF) with steel damper columns (SDCs) can be considered a damage-tolerant structure. The behavior of such a structure depends on the strength balance of the RC MRF and SDCs, and the pinching behavior of RC members. In this article, the seismic behavior of an RC MRF with SDCs under pulse-like ground motion sequences is investigated by applying an extended incremental critical pseudo-multi-impulse analysis (ICPMIA). This article consists of two analytical studies. The first focuses on (a) the degradation in energy dissipation of an RC MRF with SDCs and (b) the increase in response period due to prior earthquake damage. An extended ICPMIA of RC MRF models is carried out. The second analytical study focuses on the influence of the pulse period of pulse-like ground motion sequences on the response of RC MRFs with SDCs. The main findings are as follows. (1) When the pulse velocities of the two multi impulses (MIs) are the same in sequential MIs, the peak displacement is larger than that of a single MI if the first and second MI have the same sign. This trend is notable when the SDC strength is relatively low, and the pinching behavior of RC beam is significant. (2) The degradation in energy dissipation of an RC MRF in the second input is notable when the pinching behavior of RC beams is significant and the SDC strength is relatively low, whereas such degradation is limited when the SDC strength is relatively high. (3) The increase in RC MRF response period in the second input is notable when the pinching behavior of RC beam is significant. (4) For nonlinear time history analysis (NTHA) using sequential ground pulses, the most critical period of the second pulse is longer than that of a single pulse. (5) The most critical response obtained from NTHA for the pulses in (4) can be approximated by the extended ICPMIA results.
Keywords:
reinforced concrete moment-resisting frame
; steel damper column
; earthquake sequence
; incremental critical pseudo-multi impulse analysis
; pulse-like ground motion
; maximum momentary input energy
1. Introduction
1.1. Background and Motivations
Strong earthquakes, which cause moderate to severe damage to building structures, often occur as a series of earthquake sequences, not as a single event. In past major seismic events such as the 2011 off the Pacific coast of Tohoku Earthquake in Japan, the 2016 Kumamoto Earthquake in Japan, and the 2023 Kaharamanmaraş Earthquake in Turkey), strong aftershocks occurred following the mainshock, forming foreshock–mainshock sequences. In addition, a pair of seismic events closely spaced in time and location (doublet earthquakes) occurred in northwest Iran in August 2012 (Yaghmaei-Sabegh, 2014). Therefore, the nonlinear response of a building structure subjected to an earthquake sequence is important. It is very important to mention that the interval between two severe seismic events (e.g., the mainshock and the major aftershock) may be very short (a few hours or a few days). Therefore, the restoration of damaged structural members cannot be completed before the next strong seismic event. In a reinforced concrete (RC) moment-resisting frame (MRF), the cracking of concrete, yielding of reinforcement, and deterioration of concrete-steel bonding will cause the stiffness and strength degrading. Such degradation causes an increase in the natural period and deterioration in energy dissipation capacity of the whole structure. Therefore, the nonlinear characteristics of a damaged RC MRF are different from those of a non-damaged one.
The steel damper column (SDC) (Katayama et al., 2000) is an energy-dissipating device (damper) suitable for mid- and high-rise RC housing buildings. An RC MRF with SDCs can be considered a damage-tolerant structure (Wada et al., 2000). During the strong seismic event, SDCs absorb seismic energy prior to RC beams and columns. Therefore, such structures are expected to minimize unfavorable changes in structural characteristics of buildings due to the accumulated damage during the earthquake sequences. In a previous study (Fujii, 2025a), the author investigated the nonlinear seismic response of an eight-story RC MRF with SDCs subjected to the recorded ground motion sequences of the 2016 Kumamoto earthquakes. In this study, critical pseudo-multi impulse (PMI) analyses (Akehashi and Takewaki 2022) were extended as a substitute for sequential seismic input. The predicted peak and cumulative response of RC MRFs with SDCs agreed with those of nonlinear time history analysis (NTHA). However, to understand the basic behavior of RC MRFs with SDCs subjected to a sequential seismic input, the following questions still need to be solved:
- (a)
- How will the behavior of such a structure under earthquake sequences change as the strength balance of the RC MRF and SDCs changes?
- (b)
- How is the hysteretic dissipated energy of a damaged RC MRF with SDCs different from that of a non-damaged RC MRF with SDCs? How will the hysteretic dissipated energy of SDCs change owing to the prior damage to surrounding RC beams?
- (c)
- The natural period of a damaged RC MRF is longer than that of a non-damaged RC MRF (e.g., Di Sarno and Amiric, 2019). How will the increase in the natural period of a damaged RC MRF with SDCs change as the strength balance of this structure changes? How will the pinching behavior of RC beam affect the increase in the natural period of a damaged RC MRF with SDCs?
This study focuses on the nonlinear behavior of an RC MRF with SDCs under a pulse-like ground motion sequence.
The responses of structures under pulse-like ground motions have been widely investigated, especially after the 1994 Northridge and 1995 Kobe earthquakes. Alavi and Krawinkler (2000; 2004) investigated the response of generalized steel MRF models using a rectangular-pulse wave model. Mavroeidis et al. (2004) investigated the response of elastic and inelastic single-degree-of-freedom (SDOF) systems subjected to near-fault ground motions using the velocity pulse model proposed in their previous study (Mavroeidis and Papageorgiou, 2003). They pointed out that using the pulse period () and amplitude () “effectively normalized the elastic and inelastic response spectra of SDOF systems subjected to actual near-fault records.” Xu et al. (2007) considered the response of an SDOF model with nonlinear viscous and hysteretic dampers subjected to the velocity pulse model.
These studies emphasized that the ratio of the pulse period () to the fundamental structure period () is a key parameter for the response of a building subject to pulse-like ground motions. As mentioned above, the fundamental period of a damaged RC structure becomes longer owing to the damage caused by previous seismic events. Therefore, the relation between the pulse period and the fundamental period of a damaged RC structure is important for studying the response of such a structure to an earthquake sequence.
The nonlinear response of building structures subjected to seismic sequences has been studied by many researchers (e.g., Mahin 1980; Amadio et al. 2003; Hatzigeoriou and Beskos 2009; Hatzigeogiou 2010a and 2010b; Hatzigeorgiou and Liolios 2010; Ruiz-García and Negrete-Manriquez 2011). After the 2011 off the Pacific coast of Tohoku Earthquake in Japan, the number of studies has been increasing (e.g., Ruiz-García 2012; Di Sarno 2013; Ruiz-García 2013; Abdelnaby, and Elnashai, 2014; Yaghmaei-Sabegh and Ruiz-García 2016; Abdelnaby 2016; Di Sarno and Amiri, 2019; Yang et al. 2019). Some of them used as-recorded earthquake sequences as the seismic input for NTHA (e.g., Mahin 1980; Hatzigeorgiou and Liolios 2010; Ruiz-García and Negrete-Manriquez 2011; Abdelnaby, and Elnashai, 2014; Abdelnaby 2016), while the others used artificial earthquake sequences. To model earthquake sequences, repeated approach (applying the same ground motion several times) has been applied by Amadio et al. (2003), Hatzigeorgiou and Beskos (2009). While in the other studies, randomized approach (applying the ground motion sequences from the randomly chosen ground acceleration) have been applied for the analysis, as an alternative of repeated approach (e.g., Hatzigeorgiou 2010a; Hatzigeorgiou and Liolios 2010). Ruiz-García and Negrete-Manriquez (2011) pointed out that the repeated approach would not be suitable to model the ground motion sequences, because the frequency characteristics of recorded aftershock are weekly corelated with that of mainshock. In addition, they concluded that “as-recorded aftershocks do not significantly increase peak and permanent drift of existing steel frames”, unlike the artificial seismic sequences (repeated approach). Similarly, Yaghmaei-Sabegh and Ruiz-García (2016) pointed out that, from the analysis results of doublet earthquakes that occurred in northwest Iran in August 2012, the frequency characteristics of the second recorded mainshock in doublet earthquake is different from that corresponding to the first recorded mainshock.
One of the reasons for applying the repeated approach to model the seismic sequences is to avoid the complexity of ground motion characteristics, as mentioned by Amadio et al. (2013). Applying the real ground motion sequences or artificial ground motion sequences following randomized approaches would be more complex to understand the nonlinear response of structures under earthquake sequences. However, because the frequency characteristics of the second earthquake (the recorded aftershock in case of mainshock-aftershock sequences) is different from that corresponding to the first recorded earthquake (mainshock), the repeated approach is not considered as the proper modeling of earthquake sequences for NTHA.
Since 1980’s, the concept of “energy balance” has been applied in the study of the nonlinear response of structures (e.g., Akiyama, 1985; Akiyama, 1999; Uang and Bertero, 1990). Recent advances in energy-based seismic engineering can be found in the literature (Benavent-Climent and Mollaioli, 2021; Varum et al. 2023; Dindar et al. 2025). Akiyama (1985) has proposed the equivalent velocity of the total input energy () as the seismic intensity parameter related to the cumulative response of structures. While, for the prediction of the nonlinear peak response of ductile RC structures, Inoue and his research group proposed the equivalent velocity of the maximum momentary input energy () as the seismic intensity parameter (Hori and Inoue, 2002). There are also several studies of the nonlinear response of building structures subjected to earthquake sequences in terms of energy (e.g., Zhai et al. 2016; Alıcı and Sucuoğlu, 2024; Donaire-Ávila et al. 2024; Galé-Lamuela et al. 2025). Specifically, Donaire-Ávila et al. (2024) and Galé-Lamuela et al. (2025) examined the applicability of Akiyama’s cumulative energy distribution theory (Akiyama, 1985; Akiyama, 1999) in case of RC building models subjected to earthquake sequences. They noted that “the distribution of the cumulative dissipated energy among the stories remained basically the same across all events within a sequence, regardless of the design approach or the proneness of the frame to damage concentration.”
Takewaki and his group have developed an innovative energy approach (Kojima and Takewaki, 2015a, 2015b, 2015c; Akehashi and Takewaki 2021; 2022a; 2022b). They developed a simplified seismic input model by using a series of impulses for calculation on the critical earthquake response of structures, named as critical double impulses (DI) and critical multi impulse (MI). The development of this theory and recent achievements are summarized in the literature (Takewaki and Kojima, 2021; Takewaki, 2025a; Takewaki, 2025b). Following their studies, this author has applied their pseudo-multi impulses (PDI) and pseudo-multi impulse (PMI) analyses to an RC MRF with SDCs (Fujii, 2024a; 2024b) to verify a simplified procedure for predicting the peak and cumulative response of an RC MRF with SDCs (Fujii and Shioda, 2023). Then, the author proposed an extended version of incremental critical PMI analysis (extended ICPMIA) for predicting the nonlinear response of structures subjected to earthquake sequences (Fujii, 2025a).
In the author’s view, the strong points of this extended ICPMIA are (i) it can be performed if the structural model is stable for NTHA; (ii) it automatically calculates the cumulative response of members, which is important for discussing the accumulated damages of the structure under earthquake sequences; (iii) the responses obtained from it can be easily associated with ground motion using an energy spectrum as demonstrated in a previous study (Fujii, 2025a); and (iv) its results make nonlinear structural characteristics much easier to understand because the seismic input is simplified. In the extended ICPMIA, the simplification of seismic input introduced in the original PMI is still valid. The nonlinear characteristics of the structure obtained from the extended ICPMIA are independent of the complex frequency characteristics of selected input ground motion sequences. This is because the frequency characteristics of input ground motion are automatically determined from the nonlinear characteristics of the structure itself. This is why the extended ICMPIA would be a powerful tool for understanding the basic behavior of structures subjected to a sequential seismic input.
1.2. Objectives
In this article, the seismic behavior of an RC MRF with SDCs under pulse-like ground motion sequences is investigated by applying an extended ICPMIA. This article consists of two analytical studies. The first focuses on (a) the degradation in energy dissipation of an RC MRF and SDCs, and (b) the increase in response period due to prior earthquake damage. An extended ICPMIA of RC MRF models is carried out. The first analytical study addresses the following three questions:
- (i)
- Considering the case when the pulse velocity of each MI is the same, how will the peak displacement of an RC MRF with SDCs subjected to two MIs differ from that for a single MI?
- (ii)
- How will the hysteretic dissipated energy of RC members of a damaged RC MRF with SDCs differ from that of a non-damaged structure, and how will the hysteretic dissipated energy of SDCs of a damaged RC MRF differ from that of a non-damaged structure?
- (iii)
- How will the increase in the response period of an RC MRF with SDCs be influenced by the pinching of RC beams and the strength balance of the RC MRF and SDCs?
The second analytical study focuses on the influence of the pulse period of pulse-like ground motion sequences on the response of RC MRFs with SDCs. An NTHA of RC MRF models with SDCs is carried out using a model of sequential pulse-like ground motion. In this analysis, the pulse periods of the first and second inputs are different, whereas the peak velocities of the first and second inputs are the same. The second analytical study addresses the following two questions:
- (i)
- Which combination of the two pulse periods produces the severest response in a given RC MRF model?
- (ii)
- Considering the envelope of NTHA results and all combinations of pulse periods while the peak velocities of the first and second pulses are kept constant, can the results of the extended ICPMIA approximate the NTHA envelope?
The remainder of this article is organized as follows. Section 2 outlines the extended ICPMIA. Section 3 presents an RC MRF building model with SDCs. Section 4 shows the ICPMIA results for this building model and then discusses (i) the relationship between the equivalent velocity of the maximum momentary input energy of the first modal response () and the maximum equivalent displacement of the first modal response (), (ii) the response period of the first mode (), and (iii) the hysteretic dissipated energies of RC MRFs and SDCs ( and , respectively) during the first and second MIs. Then, NTHAs of RC MRFs with SDCs are carried out using models of pulse-like ground motion, and those results are compared with those of the extended critical PMI analysis in Section 5. Conclusions and further directions of this work are discussed in Section 6.
2. Outline of the Extended ICPMIA
2.1. Extended Critical PMI Analysis
Figure 1 outlines the extended critical PMI analysis considering sequential input. Detailed formulations of the extend critical PMI analysis can be found in the previous study (Fujii, 2025a).
A planar frame building model (with stories) is subjected to a pseudo-impulsive lateral force proportional to the first mode vector (), as shown in Figure 1a and b. In this figure, is the ground motion velocity increment, and are respectively the equivalent displacement and the equivalent velocity increment of the equivalent SDOF model representing the first modal response of building model, is the velocity increment vector of the building model.
In the extended critical PMI analysis, the seismic input is modeled as the sequences of two MIs as shown in Figure 1c1: in this figure, is the number of the pseudo-impulsive lateral force in the -th MI ( = 1, 2), is the interval length between the first and second MI, is the pulse velocity in the -th MI, is the time when the -th pseudo-impulsive lateral force acts through the -th MI. Note that the intensity of the first and last ground motion velocity increments in each MI is the half of the pulse velocity () in case of is larger than 3, following the study by Kojima and Takewaki (2015c).
The time-history of the equivalent displacement is shown in Figure 1c2. In Figure 1c2, the peak equivalent displacement during the-th MI () is obtained via Equation (1):
In Equation (1), is the time at the -th local peak of during the-th MI, as shown in Figure 1c2. The peak equivalent displacement of the first modal response over the course of the entire sequential input () is obtained via Equation (2):
The time-history of the energy of the first modal response (the kinetic energy , the damping dissipated energy , the cumulative strain energy , and the cumulative input energy ) is shown in Figure 1c3. The maximum momentary input energy of the first modal response per unit mass during the -th MI () can be obtained via Equation (3):
In Eq. (3), is the momentary input energy of the first modal response per unit mass at time = during the -th MI. The equivalent velocity of the maximum momentary input energy of the first modal response during the -th MI () is defined in Equation (4):
Therefore, the equivalent velocity of the maximum momentary input energy over the course of the entire sequential input () is obtained via Equation (5):
Next, the response period of the first mode during the-th MI () is defined as follows. When occurs at time = , the response period is calculated as twice the interval between the two local peaks in Equation (6):
For the case in Figure 1c, the red curve shown in the time history of the equivalent displacement () indicates the half cycle of the structural response when occurs. Therefore, because = = 3 in this case, the response period of the first mode during the first and second MIs ( and , respectively) is calculated as
The cumulative input energy of the first modal response per unit mass during the-th MI () can be obtained via Equation (7):
The equivalent velocity of the cumulative input energy of the first modal response during the -th MI () is defined in Equation (8):
Therefore, the equivalent velocity of the cumulative input energy over the entire sequential input () is obtained via Equation (9):
Next, the cumulative energies of RC members and SDCs at time ( and , respectively) are defined as follows. The time-histories of these cumulative energy are shown in Figure 1c4,c5. The cumulative strain energy of the whole structure at time is defined in Equation (10):
In Eq. (10), and are the restoring force and velocity vector of the -story building model. Then and are calculated via Equations (11) and (12), respectively:
In Equation (12), is the cumulative strain energy of the damper panel of each SDC in the -th story; and , , and are the shear force, shear strain, and height of the damper panel of each SDC in the -th story, respectively.
In this study, the cumulative energies of RC members and SDCs during the first MI ( and , respectively) and the second MI ( and , respectively) are discussed. These cumulative strain energies are calculated via Equation (13):
where and are the cumulative strain energies of RC members and SDCs just before the second MI starts, and is the ending time of the analysis.
2.2. Procedure for the Extended ICPMIA
In this study, an extended ICPMIA was carried out as follows.
- STEP 1: ICPMIA considering a single MI
An ICPMIA of an -story frame building model was carried out. In this step, only a single MI was considered; the numbers of pseudo-impulsive lateral forces were set as = and = 0. The pulse velocity (= ) increased until reached the predetermined value. Then, the pulse velocity of the first MI in the extended ICPMIA () was determined as the value at which equaled the target value.
- STEP 2: Extended ICPMIA considering two MIs
An extended ICPMIA of an -story frame building model was carried out. In this step, two MIs were considered; the numbers of pseudo-impulsive lateral forces were set as = = . The pulse velocity of the first MI obtained in the previous step () was used, while the pulse velocity of the second MI () increased until reached the predetermined value.
3. Building Model
The building models analyzed in this study were three eight-story housing buildings shown in Figure 2. The structural plans of the three models (Dp033, Dp050, and Dp100) are shown in Figure 2a to 2c. Model Dp100 in Figure 2c was the same model used in a previous study (Fujii, 2025a), while models Dp033 and Dp050 in Figure 2a,b had one-third and one-half the number of SDCs as Dp100, respectively. Frames A and B of all three models were assumed to extend infinitely in both longitudinal directions, and the colored area in Figure 2a to Figure 2c was modeled for the analysis. Detail of the building model properties are given in Supplementary Appendix S1. To check the strength balance of the RC MRF and SDCs, the ratio of the initial yield strength of the SDCs in the -th story () to the yield strength of the RC MRF in the -th story (), , was calculated for each model. The ranges of the ratio of models Dp033, Dp050, and Dp100 were 0.079 to 0.109, 0.119 to 0.164, and 0.238 to 0.327, respectively.
In the structural modeling, only planar behavior in the longitudinal direction was considered. All frames were connected through a rigid slab. Figure 2d shows the structure of Frame A in model Dp050. Only a two-span area was extracted from the endless longitudinal frames in DP050; therefore, the end of each boundary RC beam was supported by a horizontal roller. Figure 2e shows the structural model of Frame A in Dp100. This used the same modeling scheme as in a previous study (Fujii, 2025a). Similar modeling schemes were applied to model Dp033. The natural periods of the first modal responses in the elastic ranges of models Dp033, Dp050, and Dp100 were 0.542 s, 0.520 s, and 0.459 s, respectively.
To investigate the influence of the pinching behavior of RC beams to the nonlinear behavior of RC MRF with SDCs, two cases are considered in the hysteresis rules for RC beams in this study. Figure 3a shows the hysteresis rule of RC beams with significant pinching behavior, while the hysteresis rule shown in Figure 3b is the rule of RC beams with no pinching. Note that the same hysteresis rules applied in a previous study (Fujii, 2025a) are applied in this study. To control the pinching behavior of RC beams, the parameter was set to 0.25 in case of significant pinching, while was set to 1.00 in case of no pinching. While for RC columns, the hysteresis rules shown in Figure 3b is applied because no pinching behavior is considered in RC columns. The detail of the hysteresis rule of RC members can be found in Supplementary Appendix S2. The trilinear hysteresis model considering strain hardening of the low-yield-steel damper panel (Ono and Kaneko, 2001) shown in Figure 3c is applied for the SDC damper panel. The damping matrix was assumed to be proportional to the instantaneous (tangent) stiffness without an SDC. The damping ratio of the first modal response in the elastic range of the model without an SDC was assumed to be 0.03. Second-order effects were neglected in this analysis.
4. ICPMIA of the Building Model
The analytical study in this section focused on (a) the degradation in energy dissipation of an RC MRF with SDCs and (b) the increase in the response period due to prior earthquake damage.
4.1. Analysis Method
First, an ICPMIA considering a single MI was carried out: the numbers and were set as = 4 and = 0. The value of was set initially at 0.1 m/s with increments of 0.05 m/s until reached 150% of the target displacement (). Then, the value of that corresponded to was found by linear interpolation. In this analysis, was set to be 1/75 of the equivalent height (= 0.232 m), because this is the design limit assumed in the seismic design of model Dp100 in a previous study (Fujii, 2025a). Note that when reached 0.232 m, some of the RC beams and the bottom of the columns in the first story yielded, following the yielding of SDC damper panels. Therefore, the damage level of the whole model could be considered “moderate” when reached 0.232 m.
Next, an extended ICPMIA considering sequential MIs was carried out: the numbers and were set as = = 4. The value of was set as the value corresponding to , while the value of was set initially at 0.1 m/s with increments of 0.05 m/s until reached 150% of . As in a previous study (Fujii, 2025a), were set to 64 and 65. The case = 64, when the first and second MIs had opposite signs, is referred to as “Sequential-1”, while the case = 65, when the first and second MIs had the same sign, is referred to as “Sequential-2”. The ending time () was determined as the ending time of the 64th half cycle of free vibration after the action of the -th pseudo-impulsive lateral force.
A previous study by the author (Fujii, 2025b) investigated the suitable for near-fault earthquake ground motion using the velocity pulse model by Mavroeidis and Papageorgiou (2003). It concluded that the most suitable for the velocity pulse model analyzed was 4. Therefore, was set to 4 in this study.
4.2. Analysis Results
4.2.1. Single MI
Figure 4 shows comparisons of the – relationship and the – relationship for a single MI. The results for = 0.25 (significant pinching) are shown in Figure 4a, while Figure 4b shows the results for = 1.00 (no pinching). From Figure 4a1, the value of corresponding to = (= 0.232 m) can be found. Then, the value of corresponding to can be obtained from Figure 4a2. The following observations can be made from Figure 4:
- For = 0.25, the velocities in Dp033 corresponding to were = 1.047 m/s and = 0.5877 m/s. Similarly, those in Dp050 were = 1.108 m/s and = 0.6316 m/s, while those in Dp100 were = 1.309 m/s and = 0.7862 m/s.
- For = 1.00, the velocities and in all three models corresponding to were slightly higher than for = 0.25. That is, those velocities in model Dp033 were = 1.049 m/s and = 0.5888 m/s. Similarly, those velocities in Dp050 corresponding to were = 1.112 m/s and = 0.6336 m/s, while those in Dp100 were = 1.323 m/s and = 0.7967 m/s.
In the following analysis, the value of was set to the value in Figure 4.
4.2.2. Sequential MIs (2Vp = 1Vp)
Next, the extended ICPMIA results for = are presented. Figure 5 shows comparisons of the local response in each model in terms of the peak story drift () and the normalized cumulative strain energy of the SDC damper panel (), given by Equation (14):
In Equation (14), is the initial yield shear strain of each damper panel of the SDCs in the -th story. The following observations can be made from Figure 5:
- In models Dp033 and Dp050 ( = 0.25), for Sequential-1 was larger than that for a single MI, while in the other models, for Sequential-1 was almost the same as for the single MI. However, for Sequential-2 was larger than that for a single MI in all models.
- The values of Sequential-1 and 2 were larger than those of the single MI in all models. The difference between the values of Sequential-1 and 2 was negligible.
Figure 6 shows the hysteresis loops from PMI analysis for = in Dp033 ( = 0.25) and Dp100 ( = 0.25). The red curve indicates the half of the structural response when occurred. This figure also shows the value of and in each MI. In addition, is the ending time of the interval between the first and second MIs (= ), and is the ending time of the free vibration after the second MI (= ). Therefore, the points and in this figure indicate the residual equivalent displacement after each input is finished.
The following observations can be made from Figure 6:
- The value of is close to . The value of in Sequential-2 is almost identical to that in Sequential-1.
- For Sequential-1 (Figure 6a2,b2), the direction of the half cycle of the structural response when occurs in the second MI is opposite to that when occurs. In model Dp033 ( = 0.25), is larger than , whereas in model Dp100 ( = 0.25), is smaller than .
- For Sequential-2 (Figure 6a3,b3), the direction of the half cycle of the structural response when occurs in the second MI is the same as when occurs. In both models Dp033 and Dp100 ( = 0.25), is larger than .
- In both models Dp033 and Dp100 ( = 0.25), at time is close to the origin. In model Dp033 ( = 0.25), at time is also close to the origin in both Sequential-1 and 2. In model Dp100 ( = 0.25), a non-zero at time is observed in Sequential-1, although at time is also close to the origin in Sequential-2.
4.2.3. Sequential MIs (2Vp ≠ 1Vp)
Next, the extended ICPMIA results are shown for the case when is fixed while increases until reaches 150% of .
In Figure 7, the – curves of the second MI obtained from Sequential-1 and 2 (green and red curves, respectively) are compared with the – curve for a single MI (blue curve). In addition, large colored plots indicate the responses in the first and second MIs when equals , which is the value in Figure 4.
The following observations can be made from Figure 7:
- The – curve of Sequential-2 is below the – curve of Sequential-1: for similar values of , for Sequential-2 is smaller than for Sequential-1.
- For = , the values of Sequential-1 and 2 are almost identical and are close to for a single MI (= ). However, the relationships between the values of Sequential-1 and 2 and for a single MI (= ) depend on the model. In Sequential-2, is larger than in all models. In Sequential-1, the relationship between and depends on the model: is smaller than in models Dp050 ( = 1.00) and Dp100 (Figure 7c, e, f).
Figure 8 shows comparisons of the relationship between and the response period of the first mode (). In this figure, the – curves of the second MI obtained from Sequential-1 and 2 are compared with the – curve for a single MI. The following observations can be made from this figure:
- The difference between the – curve of Sequential-1 and the curves of Sequential-2 is limited in all models: for similar values of , for Sequential-2 is close to that for Sequential-1.
- For similar values of , the value of is larger than in all models. For Dp030 and Dp050 ( = 0.25), is larger than , regardless of the value of .
Figure 9 shows the comparisons of the relationship between the cumulative strain energy of RC members per unit mass () and . In this figure, the – curves of the second MI obtained from Sequential-1 and 2 are compared with the – curve for a single MI. The following observations can be made from this figure:
- The – curve of Sequential-2 is below the – curve of a single MI in all models: for similar values of , for Sequential-2 is lower than for a single MI. However, the relationship between the – curve of Sequential-1 and the – curve of a single MI depends on the model: in general, for similar values of , for Sequential-1 is also lower than for a single MI.
Figure 10 shows comparisons of the relationship between the cumulative SDC strain energy per unit mass () and . In this figure, the – curves of the second MI obtained from Sequential-1 and 2 are compared with the – curve for a single MI. The following observations can be made from this figure:
- The – curve of Sequential-2 is below the – curve of a single MI in all models: for similar values of , for Sequential-2 is lower than for a single MI. However, the relationship between the – curve of Sequential-1 and the – curve of a single MI depends on the model: for similar values of , for Sequential-1 may be higher than for a single MI.
4.3. Summary of Results and Discussion
This section summarizes the response of the RC MRF models with SDCs obtained from the extended ICPMIA. First, the following conclusions can be drawn for = :
- The influence of the signs of the two MIs on the peak response ( and ) was notable. The peak response during the second MI was larger than that during the first MI, when the signs of the first and second MI were the same.
- The influence of the signs of both MIs on the cumulative response () was negligible.
Next, the following conclusions can be drawn in the case when was fixed while increased:
- When the significant pinching behavior of RC beams was considered, and the strength of the SDCs was relatively low, the increases in and the natural period () in the sequential MIs for a single MI were also notable. Meanwhile, the increases in and were limited when no beam pinching behavior was considered and the SDC strength was relatively high.
- For similar values of , the cumulative strain energies of RC members and SDCs dissipated during the second MI per unit mass ( and , respectively) were lower than those for a single MI when the signs of the first and second MIs were the same. For = , was lower than while was higher than . These trends were pronounced when the significant pinching behavior of RC beam was considered.
Therefore, the cumulative strain energy demand of SDCs would be more pronounced in earthquake sequences. This is due to the decrease in energy dissipation in the second seismic input of RC members, not only the increase in seismic energy input. This would be pronounced when significant pinching of RC members was expected and the SDC strength was relatively low.
5. Responses of Building Models under Sequential Pulse-like Ground Motions
The analytical study in this section focused on the influence of the pulse period of pulse-like ground motion sequences on the responses of RC MRF models.
5.1. Analysis Method
5.1.1. Pulse-like ground motion models
Figure 11 shows the pulse-like ground motion models used in NTHAs. In this study, the velocity pulse model proposed by Mavroeidis and Papageorgiou (2003) was used as the single seismic input. The time history of the velocity pulse of this model is expressed as Equation (15):
where is the velocity amplitude; is the pulse period; and , , and are the parameters of this pulse model. Here, the parameters were set as = 10 s, = 2, and = 0° and 90°. The single-pulse model = 0° is referred to as Single-Pulse-000, while = 90° is referred to as Single-Pulse-090. Acceleration time histories of these single-pulse models ( = 1.0 m/s, = 1.0 s) are shown in Figure 11a.
Figure 11b shows the energy spectra ( and ) of these single-pulse models ( = 1.0 m/s, = 1.0 s). The and spectra were calculated using the time-varying function proposed in one of our previous studies (Fujii et al., 2021): the complex damping coefficient was set to 0.10, following another of our previous studies (Fujii and Shioda, 2023). The amplitude of each single-pulse model was determined by equating the peak value of the spectrum in Figure 11b and the value corresponding to in Figure 4.
The sequential-pulse model used in this analysis was based on the velocity pulse model by Mavroeidis and Papageorgiou (2003). The time history of the sequential velocity pulse model is expressed as Equation (16):
where and are the amplitude and pulse period of the -th input ( = 1, 2); and , , and are the parameters of this pulse model. In this analysis, the parameters were set as = 10 s, = 30 s, = = 2, and = = 0° and = = 90°. The sequential-pulse model = = 0° is referred to as Sequential-Pulse-000, while = = 90° is referred to as Sequential-Pulse-090. Acceleration time histories ( = = 1.0 m/s) are shown in Figure 11c1 for Sequential-Pulse-000 ( = 1.1 s, = 1.5 s) and Figure 11c2 for Sequential-Pulse-090 ( = 1.2 s, = 1.7 s). This section also studies the influence of the signs of the first and second inputs, namely, the same-sign case = and opposite-sign case = .
5.1.2. Analysis Procedure
First, an NTHA was carried out on the single-pulse model via the following procedure:
- (i)
- The pulse period () was increased from 0.5 s to 2.5 s in increments of 0.1 s.
- (ii)
- The peak equivalent displacement of the first modal response () was calculated from the NTHA results, according to the procedure presented in a previous study (Fujii, 2022).
- (iii)
- The largest was found along with the corresponding (= ).
Note that different values of could be obtained for Single-Pulse-000 and Single-Pulse-090.
Then, an NTHA was carried out on the sequential-pulse model via the following procedure:
- (i)
- The pulse period of the first input () was fixed as the value obtained from the single-pulse model, while that of the second input () was increased from 0.5 s to 2.5 s in increments of 0.1 s.
- (ii)
- The value of was calculated from the NTHA results.
- (iii)
- The largest was found along with the corresponding (= ).
5.2. Analysis Results
5.2.1. Single-Pulse Model
Figure 12 shows comparisons of the local responses ( and ) obtained from the NTHA using the single-pulse models and critical PMI analysis. This figure shows all the NTHA results for Single-Pulse-000 and Single-Pulse-090 and their envelopes. “PMI” in this figure is the ICPMIA result corresponding to in Figure 5.
The following observations can be made from Figure 12:
- The values obtained from PMI agree well with the envelopes of the NTHA results, although slight underestimations are observed in the upper (sixth and seventh) stories.
- The values obtained from PMI are close to the NTHA envelopes.
Therefore, the and envelopes from NTHA for both Single-Pulse-000 and Single-Pulse-090 can be approximated by the ICPMIA results, assuming = 4. This result is consistent with the results of a previous study (Fujii, 2025b).
Figure 13 shows comparisons of the – relationship obtained from NTHA in the single-pulse models. In this figure, the ICPMIA values of and are shown for comparison.
The following observations can be made from Figure 13:
- The largest value obtained from Single-Pulse-000 is slightly larger than that from Single-Pulse-090. Meanwhile, the values of obtained from Single-Pulse-000 and 090 are different. As shown in Figure 13a (model Dp033, = 0.25), the largest obtained from Single Pulse-000 is 0.2292 m, while that from Single Pulse-090 is 0.2136 m. In addition, the value of obtained from Single-Pulse-000 is 1.1 s, while that from Single-Pulse-090 is 1.2 s.
- The largest value obtained from NTHA is close to from ICPMIA.
- The values of are slightly smaller than the values from ICPMIA. The range of for all models is 0.87 to 0.90.
5.2.2. Sequential-Pulse Model
Figure 14 shows comparisons of the local responses ( and ) obtained from NTHA using sequential-pulse models and extended critical PMI analysis. This figure shows all the NTHA results for Sequential-Pulse-000 and Sequential-Pulse-090 along with their envelopes. “Extended PMI” in this figure consists of the envelopes of Sequential-1 and 2 in Figure 5.
The following observations can be made from Figure 14:
- The values obtained from Extended PMI agree well with the NTHA envelopes for Dp050 and Dp100. However, for Dp033, the values from Extended PMI underestimate the NTHA envelope.
- The values obtained from Extended PMI are close to the NTHA envelopes.
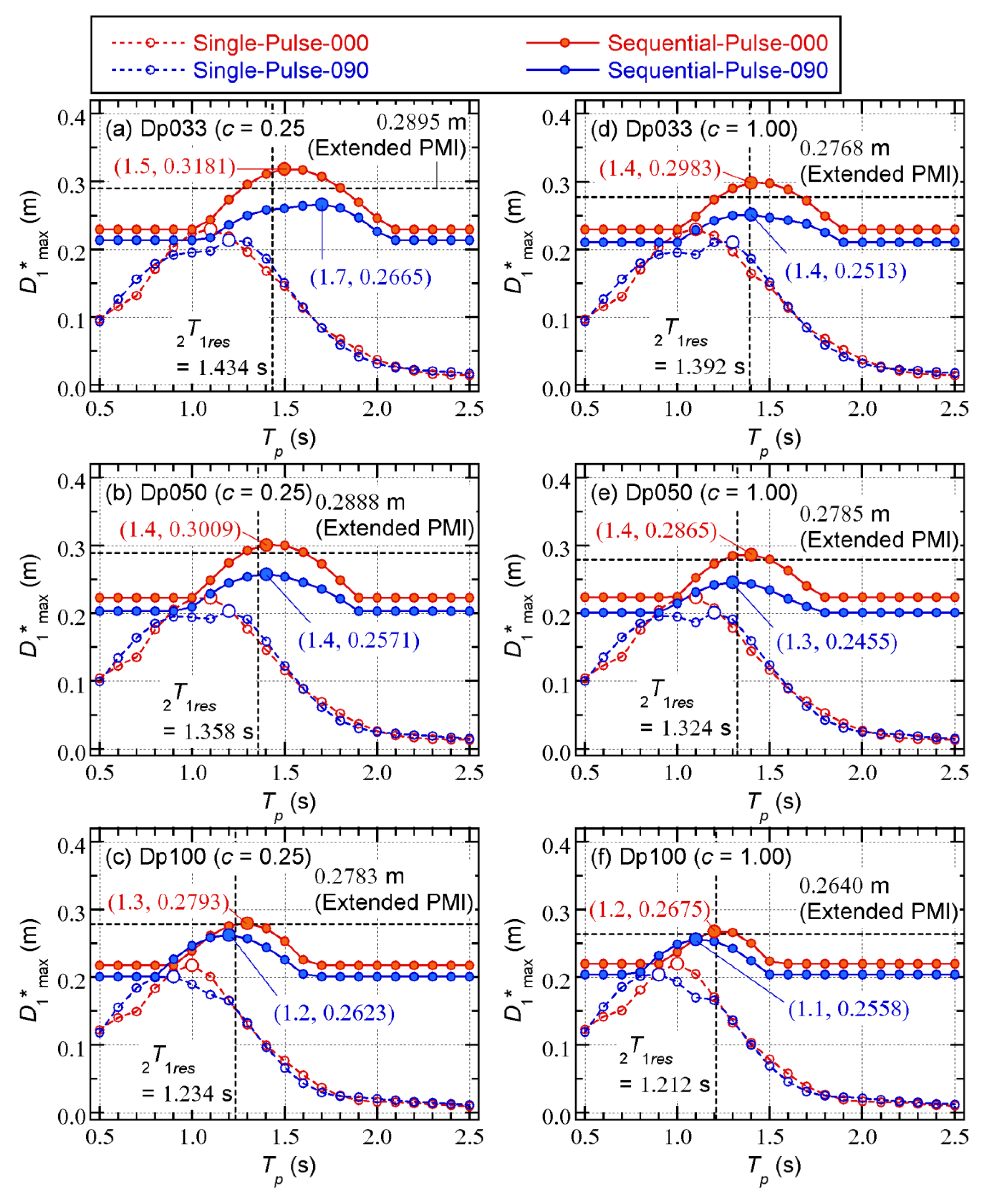
Figure 15 shows comparisons of the – relationship from NTHA in the sequential pulse models. For each value, the larger value obtained from NTHA using the same-sign ( = ) and opposite-sign ( = ) inputs is plotted in this figure. The values of and obtained from extended ICPMIA (Sequential-2) are shown for comparison.
The following observations can be made from Figure 15:
- The largest values obtained from NTHA are close to from extended ICPMIA. The largest value from Sequence-Pulse-000 is larger than from extended ICPMIA for all models. Meanwhile, the largest from Sequence Pulse-090 is smaller than from extended ICPMIA.
- The value of obtained from the sequential-pulse model is larger than from the single-pulse model. For model Dp033 ( = 0.25) in Figure 15a, the ratio is 1.5/1.1 = 1.36 for Sequential-Pulse-000, while is 1.7/1.2 = 1.42 for Sequential-Pulse-090. Meanwhile, for model Dp100 ( = 0.25) in Figure 15c, the ratios for Sequential-Pulse-000 and 090 are 1.2/1.0 = 1.20 and 1.1/0.9 = 1.22, respectively.
- The values of are close to from extended ICPMIA.
5.3. Discussion
The analysis results in this section can be summarized as follows:
- The ICPMIA results provide accurate approximations of the most critical local response (peak story drift and normalized cumulative strain energy of SDC damper panels) for the single-pulse models. In addition, the extended ICPMIA results accurately approximate the most critical local response for the sequential-pulse models.
- For a sequential-pulse model, the pulse-period condition < produces the most critical response for a given RC MRF model. In other words, repeating the same pulse model with the same pulse period ( = = ) will not produce the most critical response for the sequential pulsive input.
The second conclusion is consistent with the results in the previous section. That is, because the response period of the first mode in the second MI () is longer than that in the first MI(), should be longer than to produce the most critical response for a sequential input of two pulses. It should be emphasized that applying the same ground acceleration several times (the repeated approach), which has been done in many past studies, does not produce the most critical response for the earthquake sequences.
6. Conclusions
In this article, the seismic behavior of an RC MRF with SDCs under pulse-like ground motion sequences was investigated by applying an extended ICPMIA. An extended ICPMIA of RC MRF models was carried out in the first part of this study. The main conclusions from the first part can be summarized as follows:
- (I)
- When the pulse velocities of the two MIs are the same in the sequential MIs, the equivalent velocities of the maximum momentary input energy of the first modal response () in both MIs are similar. The peak equivalent displacement () of an RC MRF with SDCs in sequential MIs is larger than that for a single MI when the signs of the first and second MIs are the same. This trend is notable when the SDC strength is relatively low, and the pinching behavior of RC beam is significant.
- (II)
- For similar values of , the cumulative strain energy of RC members during the second MI in the sequential MIs is smaller than that for a single MI. This trend is notable when the pinching behavior of RC beam is significant. Meanwhile, the cumulative strain energy of SDCs during the second of the sequential MIs is smaller than that for a single MI when the signs of the first and second MIs are the same.
- (III)
- For similar values of , the response period of the first mode in the second MI () is longer than that for a single MI. This trend is notable when the SDC strength is relatively lower, and the pinching behavior of RC beam is significant.
The second analytical study focused on the influence of the pulse period of pulse-like ground motion sequences on the response of RC MRFs with SDCs. An NTHA of RC MRF models with SDCs was carried out using the sequential pulse-like ground motion model. The main conclusions from the second part can be summarized as follows:
- (I)
- In the NTHA results for sequential pulse-like ground motion, the most critical period of the second input () is longer than that of a single input ().
- (II)
- The most critical response obtained from NTHA using sequential pulses can be approximated by the extended ICPMIA results.
Conclusions (I) to (II) answer questions (i) to (ii) in Section 1.2. These conclusions support the effectiveness of the extended ICPMIA presented in the author’s previous study (Fujii, 2025a).
The significance of this study can be summarized in two points. The first is that the extended ICPMIA clearly evaluates the basic behavior of RC MRFs with SDCs subjected to an earthquake sequence. Specifically, this study has clearly evaluated the influence of the strength ratio of SDCs to RC MRF and the pinching behavior of RC beam on (a) the peak displacement of the RC MRF in a sequential seismic input, (b) degradation in hysteretic dissipated energy of RC members and SDCs during the second seismic input in the non-damaged case, and (c) the increase in natural period in the second seismic input in the non-damaged case. Unlike the results of most previous studies, the results herein are independent of the complex frequency characteristics of the selected input ground motions used in NTHA. Therefore, those presented herein represent the basic nonlinear characteristics of an RC MRF with SDCs because they are derived from the analyzed structures themselves. The second point is that the most critical response of an RC MRF with SDCs subjected to a sequential pulsive input can be approximated by the extended ICPMIA. This achievement contributes to the method of seismic design of building structures considering earthquake sequences.
Note that these results may only be valid for the RC MRF models with SDCs studied herein. Therefore, without further verification using additional building models, the following questions remain unanswered. This list is not comprehensive:
- One of the most important issues in the seismic design of an RC MRF with SDCs is evaluating the damage to RC members and SDCs. Because the damper panel in SDC is made of low-yield-strength steel, its damage evaluation may be based on the peak shear strain and the cumulative strain energy. If the proper relationship between the ultimate peak shear strain (or strain amplitude) and cumulative strain energy at failure of the damper panel is known, then it is possible to evaluate the limit of the story drift of an RC MRF when the damper panel reaches the failure. What will the story drift limit be? Will it be larger than the story drift considered in the design of an RC MRF with SDCs (e.g., 2%)? How will the number of impulsive inputs () influence the story drift limit?
- One of our previous studies (Fujii and Shioda, 2023) proposed a simplified procedure to predict the peak and cumulative responses of an RC MRF with SDCs, based on nonlinear static (pushover) analysis. To extend this simplified procedure to the case of an earthquake sequence, it is necessary to evaluate the − and − (or − ) relationships of RC MRFs. How can and be formulated considering the previous response of the RC MRF?
Supplementary Materials
The following supporting information can be downloaded at the website of this paper posted on Preprints.org.
Author Contributions
KF: Writing–original draft; writing–review; and editing.
Funding
This study received financial support from JSPS KAKENHI Grant Number JP23K04106.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the author without undue reservation.
Acknowledgments
The author thanks Edanz (https://www.jp.edanz.com/ac) for editing a draft of this manuscript.
Conflict of Interest
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Transparency Statement
This manuscript is a part of the research project (JSPS KAKENHI Grant Number JP23K0416). The part of finding from this research project have been reported in the work previously published (Fujii, K. (2025), Seismic response of reinforced concrete moment-resisting frame with steel damper columns under earthquake sequences: evaluation using extended critical pseudo-multi impulse analysis. Frontiers in Built Environment. 11, 1561534). The same structural model (Dp100 in this manuscript) is used in the previous work, while the other models (Dp033 and Dp050) are the models newly created for this study, as variants of the model Dp100. The previous work was focused on the proposal of the extended ICPMIA and its applicability for the predicting the responses of RC MRFs with SDCs subjected to earthquake sequences. Meanwhile, this work is the parametric study of RC MRFs with SDCs using the extended ICPMIA, focusing on the basic behaviors of RC MRFs with SDCs subjected to sequential seismic input (e.g., the response period of structures, energy dissipation of RC MRFs and SDCs). In this parametric study, influence of the strength balance of RC MRFs and SDCs to the response under sequential seismic input, which cannot be included in the previous study, is also investigated. The analysis data shown in this manuscript is originally created in this study and unpublished previously.
Abbreviations
- DI = double impulse
- ICPMIA = incremental critical pseudo-multi-impulse analysis
- MDOF = multi-degree-of-freedom
- MI = multi impulse
- MRF = moment-resisting frame
- NTHA = nonlinear time history analysis
- PDI = pseudo-double impulse
- PMI = pseudo-multi impulse
- RC = reinforced concrete
- SDC = steel damper column
- SDOF = single-degree-of-freedom
References
- Abdelnaby, A.E. (2016). Fragility curves for RC frames subjected to Tohoku mainshock-aftershocks sequences. Journal of Earthquake Engineering. 22(5), 902–920. [CrossRef]
- Abdelnaby, A.E., Elnashai, A.S. (2014). Performance of degrading reinforced concrete frame systems under the Tohoku and Christchurch earthquake sequences. Journal of Earthquake Engineering. 18, 1009–1036. [CrossRef]
- Akehashi, H., Takewaki, I. (2021). Pseudo-double impulse for simulating critical response of elastic-plastic MDOF model under near-fault earthquake ground motion. Soil Dynamics and Earthquake Engineering. 150, 106887. [CrossRef]
- Akehashi, H., Takewaki, I. (2022a). Pseudo-multi impulse for simulating critical response of elastic-plastic high-rise buildings under long-duration, long-period ground motion. The Structural Design of Tall and Special Buildings. 31(14), e1969.
- Akehashi, H., Takewaki, I. (2022b). Bounding of earthquake response via critical double impulse for efficient optimal design of viscous dampers for elastic-plastic moment frames. Japan Architectural Review. 5(2), 131–149. [CrossRef]
- Akiyama, H. (1985). Earthquake resistant limit-state design for buildings. Tokyo: University of Tokyo Press.
- Akiyama, H. (1999). Earthquake-resistant design method for buildings based on energy balance. Tokyo: Gihodo Shuppan.
- Alıcı, F.S., Sucuoğlu, H. (2024). “Input energy from mainshock-aftershock sequence during February 6, 2023 Earthquakes in South East Türkiye”, in Proceedings of the 18th World Conference on Earthquake Engineering, Milan, Italy.
- Alavi, B., Krawinkler, H. (2000). “Consideration of near-fault ground motion effect in seismic design”, in Proceedings of the 12th World Conference on Earthquake Engineering, Auckland, New Zealand.
- Alavi, B., Krawinkler, H. (2004). Behavior of moment-resisting frame structures subjected to near-fault ground motions. Earthquake Engineering and Structural Dynamics. 33, 687–706. [CrossRef]
- Amadio, C., Fragiacomo, M., Rajgelj, S. (2003). The effects of repeated earthquake ground motions on the non-linear response of SDOF system. Earthquake Engineering and Structural Dynamics. 32, 291–308. [CrossRef]
- Benavent-Climent, A., Mollaioli, F. (eds) (2021). Energy-Based Seismic Engineering, Proceedings of IWEBSE 2021. Cham: Springer. [CrossRef]
- Dindar, A. A., Benavent-Climent, A., Mollaioli, F., Varum, H. (eds) (2025). Energy-Based Seismic Engineering, Proceedings of IWEBSE 2025. Cham: Springer.
- Di Sarno, L. (2013). Effects of multiple earthquakes on inelastic structural response. Engineering Structures. 56, 673–681. [CrossRef]
- Di Sarno, L., Amiri, S. (2019). Period elongation of deteriorating structures under mainshock-aftershock sequences. Engineering Structures. 196, 109341.
- Donaire-Ávila, J., Galé-Lamuela, D., Benavent-Climent, A., Mollaioli, F. (2024). “Cumulative damage in buildings designed with energy and force methods under sequences of earthquakes”, in Proceedings of the 18th World Conference on Earthquake Engineering, Milan, Italy.
- Fujii, K. (2022). Peak and cumulative response of reinforced concrete frames with steel damper columns under seismic sequences. Buildings. 12, 275. [CrossRef]
- Fujii, K. (2024a), Critical pseudo-double impulse analysis evaluating seismic energy input to reinforced concrete buildings with steel damper columns. Frontiers in Built Environment. 10, 1369589. [CrossRef]
- Fujii, K. (2024b), Seismic capacity evaluation of reinforced concrete buildings with steel damper columns using incremental pseudo-multi impulse analysis. Frontiers in Built Environment. 10, 1431000.
- Fujii, K. (2025a), Seismic response of reinforced concrete moment-resisting frame with steel damper columns under earthquake sequences: evaluation using extended critical pseudo-multi impulse analysis. Frontiers in Built Environment. 11, 1561534. [CrossRef]
- Fujii, K. (2025b), “Choice of the number of impulsive Inputs in the ICPMIA as a substitute for near-fault seismic input to RC MRFs, ”in Energy-Based Seismic Engineering, Proceedings of IWEBSE 2025, Istanbul, Türkiye.
- Fujii, K., Kanno, H., Nishida, T. (2021). Formulation of the time-varying function of momentary energy input to a single-degree-of-freedom system using Fourier series. Journal of Japan Association for Earthquake Engineering. 21(3), 28–47. [CrossRef]
- Fujii, K., Shioda, M. (2023). Energy-based prediction of the peak and cumulative response of a reinforced concrete building with steel damper columns. Buildings. 13, 401. [CrossRef]
- Galé-Lamuela, D., Donaire-Ávila, J., Benavent-Climent, A., Mollaioli, F. (2025). “Damage Distribution in Buildings Under Sequences of Earthquakes, ”in Energy-Based Seismic Engineering, Proceedings of IWEBSE 2025, Istanbul, Türkiye.
- Hatzigeorgiou, G.D. (2010a). Behavior factors for nonlinear structures subjected to multiple near-fault earthquakes. Computers and Structures. 88, 309–321. [CrossRef]
- Hatzigeorgiou, G.D. (2010b). Ductility demand spectra for multiple near-and far-fault earthquakes. Soil Dynamics and Earthquake Engineering. 30, 170–183. [CrossRef]
- Hatzigeorgiou, G.D., Beskos, D.E. (2009). Inelastic displacement ratios for SDOF structures subjected to repeated earthquakes. Engineering Structures. 31, 2744–2755. [CrossRef]
- Hatzigeorgiou G.D., Liolios A.A. (2010). Nonlinear behaviour of RC frames under repeated strong ground motions. Soil Dynamics and Earthquake Engineering. 30, 1010–1025. [CrossRef]
- Hori, N., Inoue, N. (2002). Damaging properties of ground motion and prediction of maximum response of structures based on momentary energy input. Earthquake Engineering and Structural Dynamics. 31, 1657–1679. [CrossRef]
- Katayama, T., Ito, S., Kamura, H., Ueki, T., Okamoto, H. (2000). “Experimental study on hysteretic damper with low yield strength steel under dynamic loading,” in Proceedings of the 12th World Conference on Earthquake Engineering, Auckland, New Zealand.
- Kojima, K., Takewaki, I. (2015a). Critical earthquake response of elastic–plastic structures under near-fault ground motions (Part 1: Fling-step input). Frontiers in Built Environment. 1, 12. [CrossRef]
- Kojima, K., Takewaki, I. (2015b). Critical earthquake response of elastic–plastic structures under near-fault ground motions (Part 2: Forward-directivity input). Frontiers in Built Environment. 1, 13. [CrossRef]
- Kojima, K., Takewaki, I. (2015c). Critical input and response of elastic–plastic structures under long-duration earthquake ground motions. Frontiers in Built Environment. 1, 15. [CrossRef]
- Mahin, A. (1980). “Effect of duration and aftershock on inelastic design earthquakes,” in Proceedings of the 9th World Conference on Earthquake Engineering, Istanbul, Turkey.
- Mavroeidis, G.P., Papageorgiou, A. S. (2003). A Mathematical Representation of Near-Fault Ground Motions. Bulletin of the Seismological Society of America. 93(3), 1099–1131.
- Mavroeidis, G.P., Dong. G., Papageorgiou, A. S. (2004). Near-fault ground motions, and the response of elastic and inelastic single-degree-of-freedom (SDOF) systems. Earthquake Engineering and Structural Dynamics. 33, 1023–1049.
- Ono, Y.; Kaneko, H. (2001). “Constitutive rules of the steel damper and source code for the analysis program,” in Proceedings of the Passive Control Symposium 2001, Yokohama, Japan (In Japanese). (In Japanese)
- Ruiz-García, J., Negrete-Manriquez, J.C. (2011). Evaluation of drift demands in existing steel frames under as-recorded far-field and near-fault mainshock–aftershock seismic sequences. Engineering Structures. 33. 621–634. [CrossRef]
- Ruiz-García, J. (2012). Mainshock-Aftershock Ground Motion Features and Their Influence in Building's Seismic Response. Journal of Earthquake Engineering. 16(5), 719–737. [CrossRef]
- Ruiz-García, J. (2013). “Three-dimensional building response under seismic sequences,” in Proceedings of the 2013 World Congress on Advances in Structural Engineering and Mechanics (ASEM13), Jeju, Korea.
- Takewaki, I. (2025). Review: Critical Excitation Problems for Elastic–Plastic Structures Under Simple Impulse Sequences. Japan Architectural Review. 8, e70037. [CrossRef]
- Takewaki, I., Kojima, K. (2021). An Impulse and Earthquake Energy Balance Approach in Nonlinear Structural Dynamics. Boca Raton, FL: CRC Press.
- Uang, C., Bertero, V.V. (1990). Evaluation of seismic energy in structures. Earthquake Engineering and Structural Dynamics. 19, 77–90. [CrossRef]
- Varum, H., Benavent-Climent, A., Mollaioli, F. (eds) (2023). Energy-Based Seismic Engineering, Proceedings of IWEBSE 2023. Cham: Springer.
- Wada, A., Huang, Y., Iwata, M. (2000). Passive damping technology for buildings in Japan. Progress in Structural Engineering and Materials. 2(3), 335–350.
- Xu, Z., Agrawal, A. K., He, W. L., Tan, P. (2007). Performance of passive energy dissipation systems during near-field ground motion type pulses. Engineering Structures. 29. 224–236. [CrossRef]
- Yaghmaei-Sabegh, S. (2014). Time–frequency analysis of the 2012 double earthquakes records in North-West of Iran. Bulletin of Earthquake Engineering. 12, 585–606. [CrossRef]
- Yaghmaei-Sabegh, S., Ruiz-García, J. (2016). Nonlinear response analysis of SDOF systems subjected to doublet earthquake ground motions: A case study on 2012 Varzaghan–Ahar events. Engineering Structures. 110, 281–292. [CrossRef]
- Yang, F., Wang, G., Ding, Y. (2019). Damage demands evaluation of reinforced concrete frame structure subjected to near-fault seismic sequences. Natural Hazards. 97, 841–860. [CrossRef]
- Zhai, C., Ji, D., Wen, W., Lei, W., Xie, L., Gong, M. (2016). The inelastic input energy spectra for main shock–aftershock sequences. Earthquake Spectra, 32(4), 2149–2166. [CrossRef]
Figure 1.
Extended Critical PMI Analysis. (a) equivalent SDOF model, (b) building model oscillates in the first mode, (c) time-history. Note that this figure is reproduced from Fujii (2025a): Figure 1c4,c5 are newly added to show the time-history of strain energy of RC members and SDCs.
Figure 1.
Extended Critical PMI Analysis. (a) equivalent SDOF model, (b) building model oscillates in the first mode, (c) time-history. Note that this figure is reproduced from Fujii (2025a): Figure 1c4,c5 are newly added to show the time-history of strain energy of RC members and SDCs.
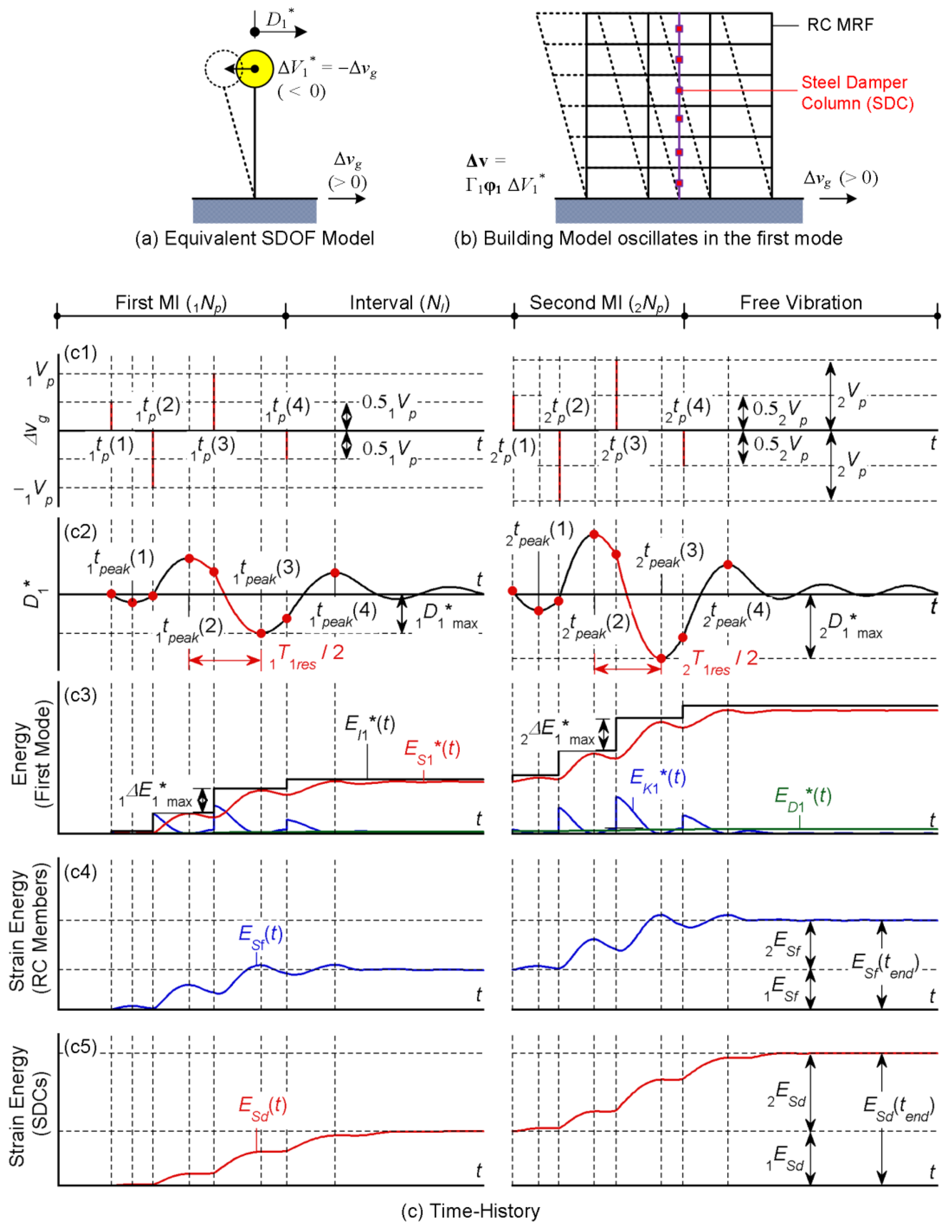
Figure 2.
Building Model. (a) structural plan (Dp033), (b) structural plan (Dp050), (c) structural plan (Dp100), (d) structural model of frame A (Dp050), (e) structural model of frame A (Dp100).
Figure 2.
Building Model. (a) structural plan (Dp033), (b) structural plan (Dp050), (c) structural plan (Dp100), (d) structural model of frame A (Dp050), (e) structural model of frame A (Dp100).
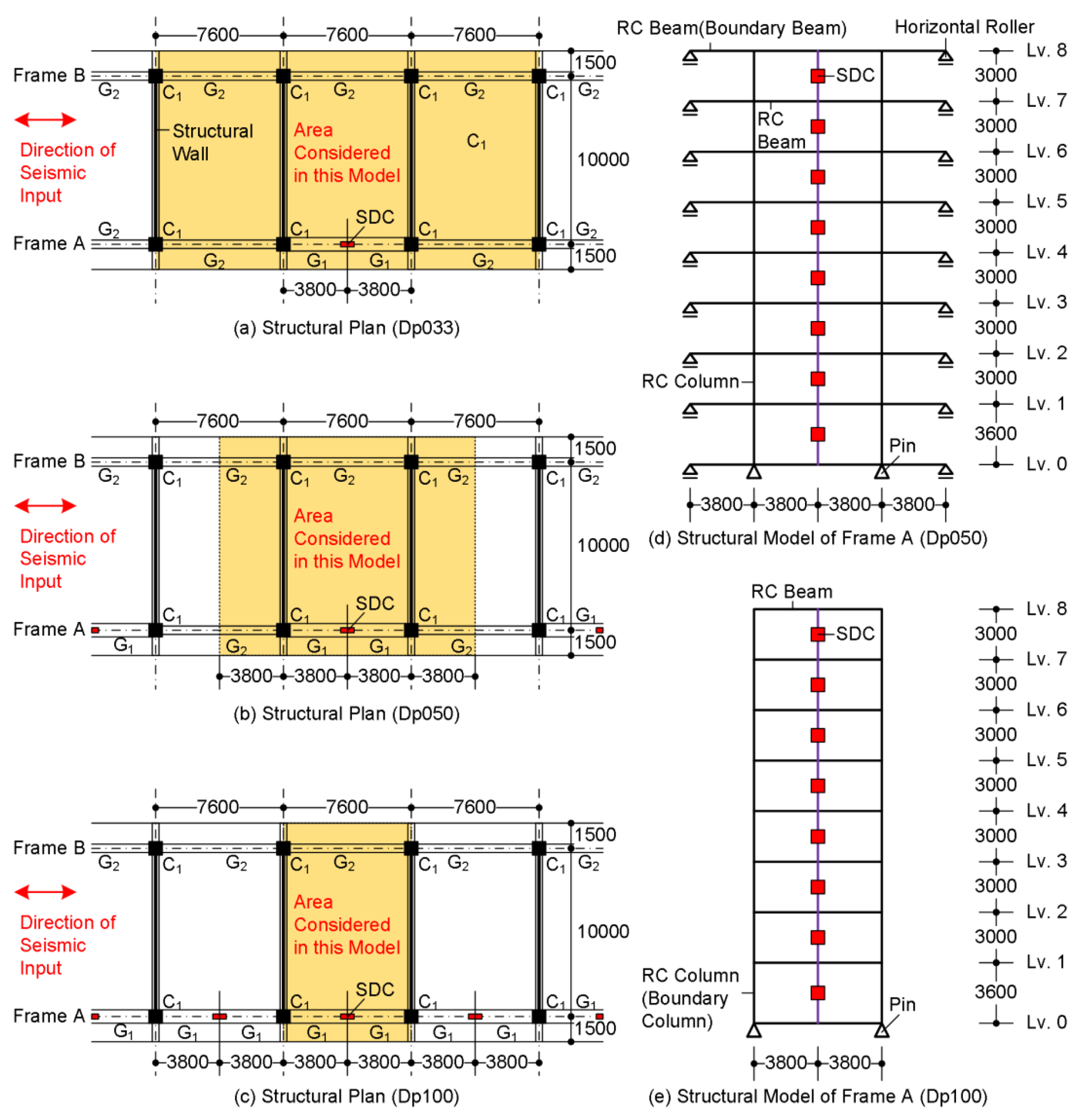
Figure 3.
Hysteresis Model (Fujii, 2025a). (a) RC beam (c = 0.25), (b) RC beam (c = 1.00) and RC column, (c) damper panel (SDC).
Figure 3.
Hysteresis Model (Fujii, 2025a). (a) RC beam (c = 0.25), (b) RC beam (c = 1.00) and RC column, (c) damper panel (SDC).
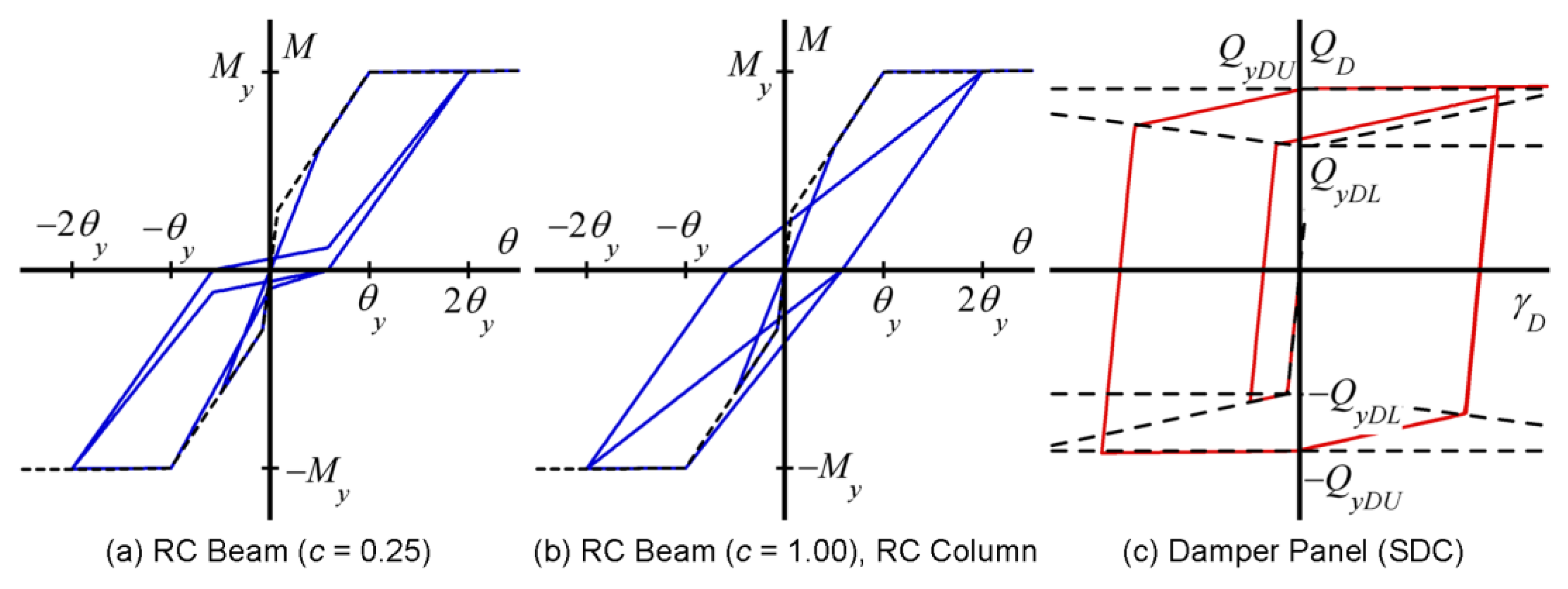
Figure 4.
Comparisons of the VΔE1* – D1*max relationship and the VΔE1* – Vp relationship in case of a single MI. (a) c = 0.25, (b) c = 1.00.
Figure 4.
Comparisons of the VΔE1* – D1*max relationship and the VΔE1* – Vp relationship in case of a single MI. (a) c = 0.25, (b) c = 1.00.
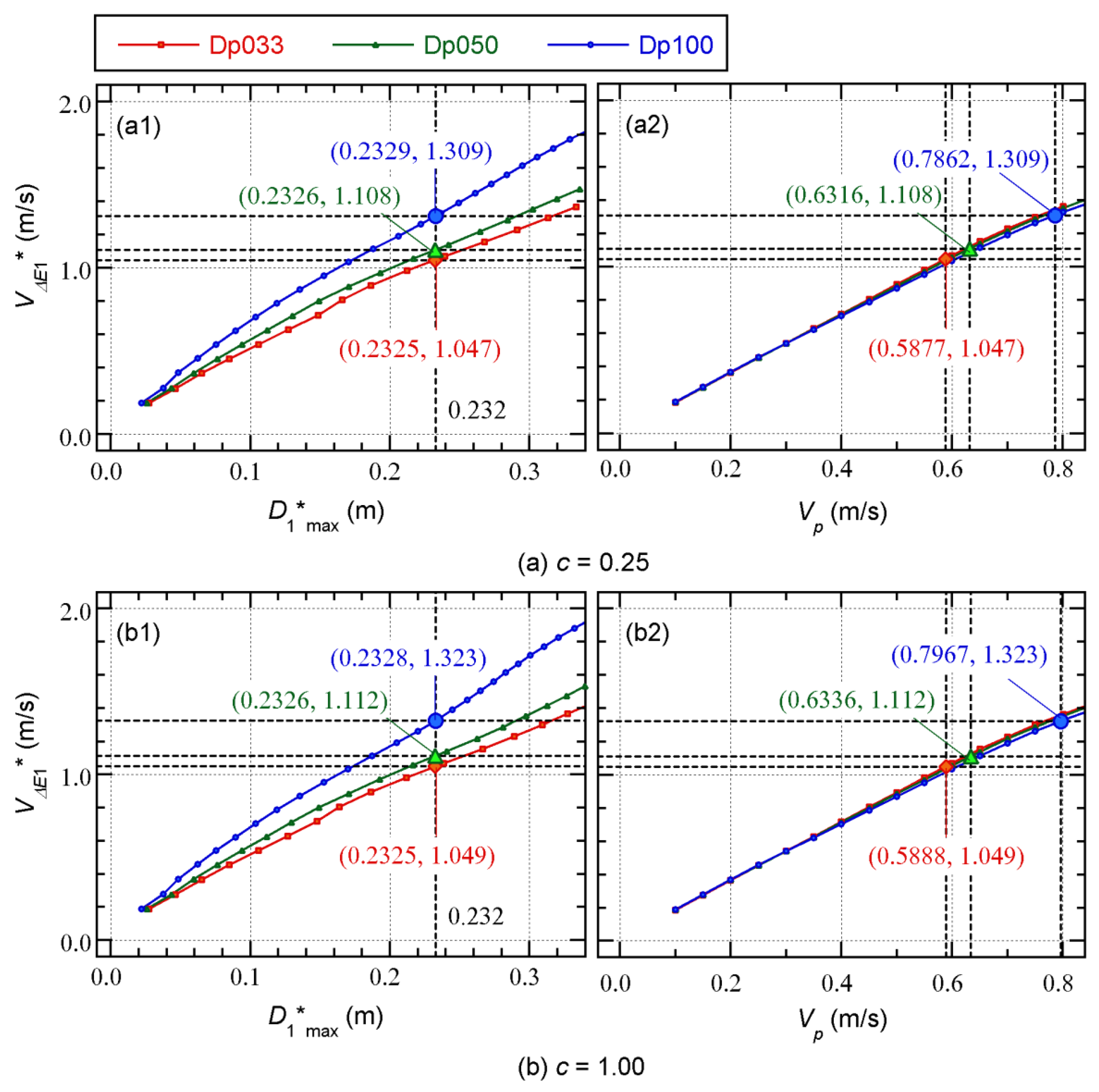
Figure 5.
Comparisons of the local responses obtained from critical PMI analyses in case of 2Vp = 1Vp. (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
Figure 5.
Comparisons of the local responses obtained from critical PMI analyses in case of 2Vp = 1Vp. (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
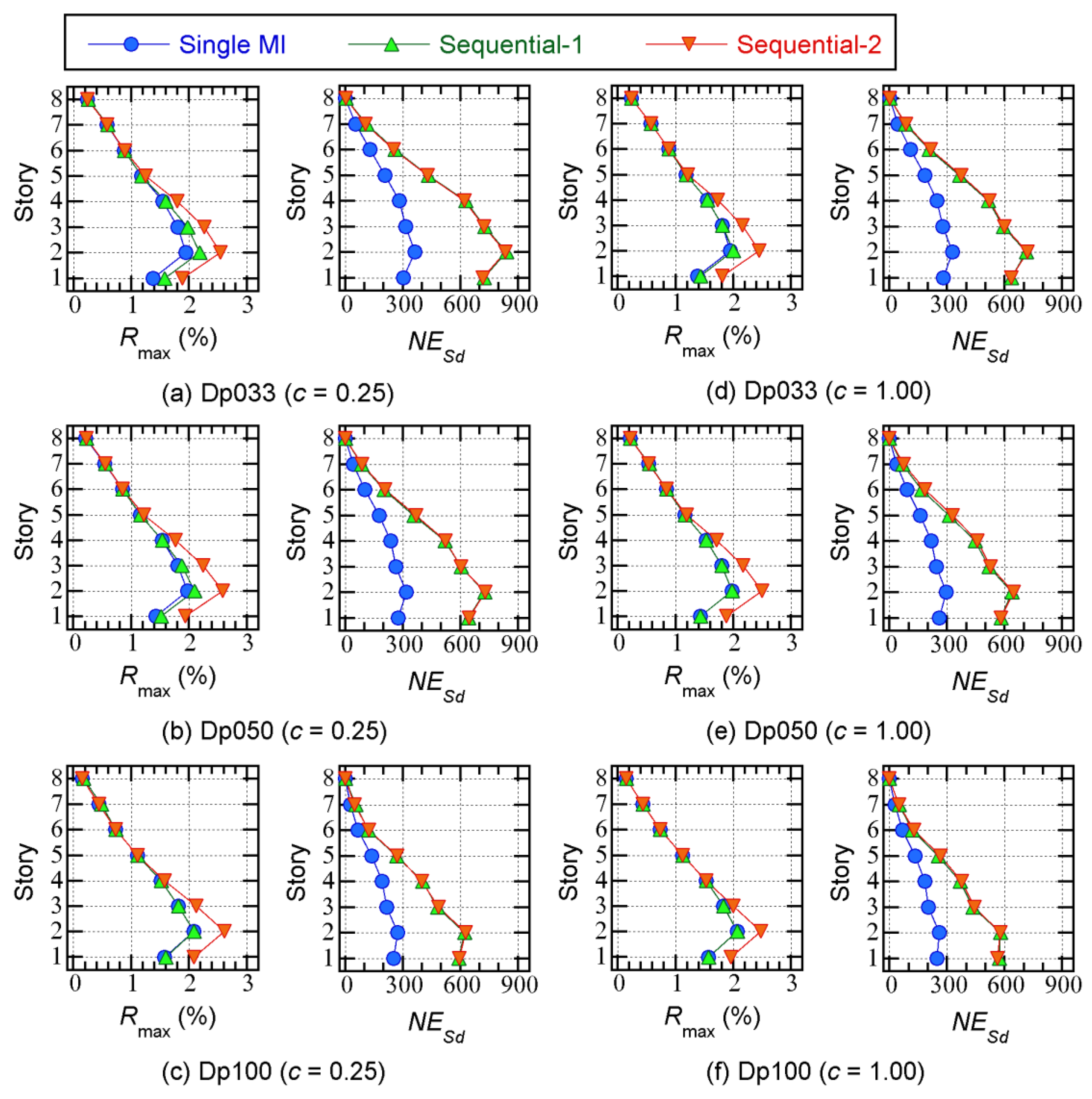
Figure 6.
Hysteresis Loop obtained from PMI analysis in case of 2Vp = 1Vp. (a) Dp033 (c = 0.25), (b) Dp100 (c = 0.25).
Figure 6.
Hysteresis Loop obtained from PMI analysis in case of 2Vp = 1Vp. (a) Dp033 (c = 0.25), (b) Dp100 (c = 0.25).
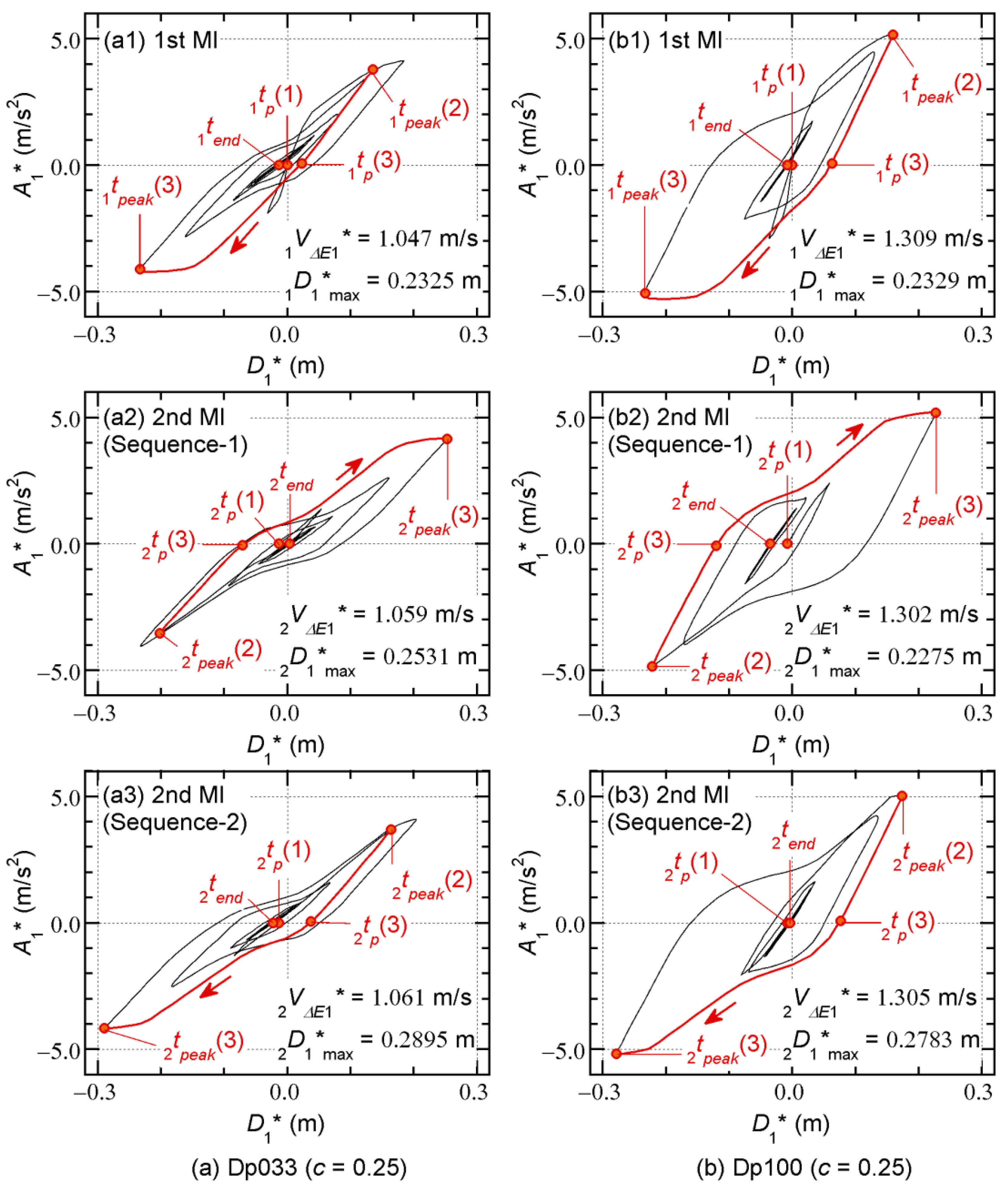
Figure 7.
Comparisons of the VΔE1* – D1*max relationship.(a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
Figure 7.
Comparisons of the VΔE1* – D1*max relationship.(a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).

Figure 8.
Comparisons of the VΔE1* – T1res relationship. (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
Figure 8.
Comparisons of the VΔE1* – T1res relationship. (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
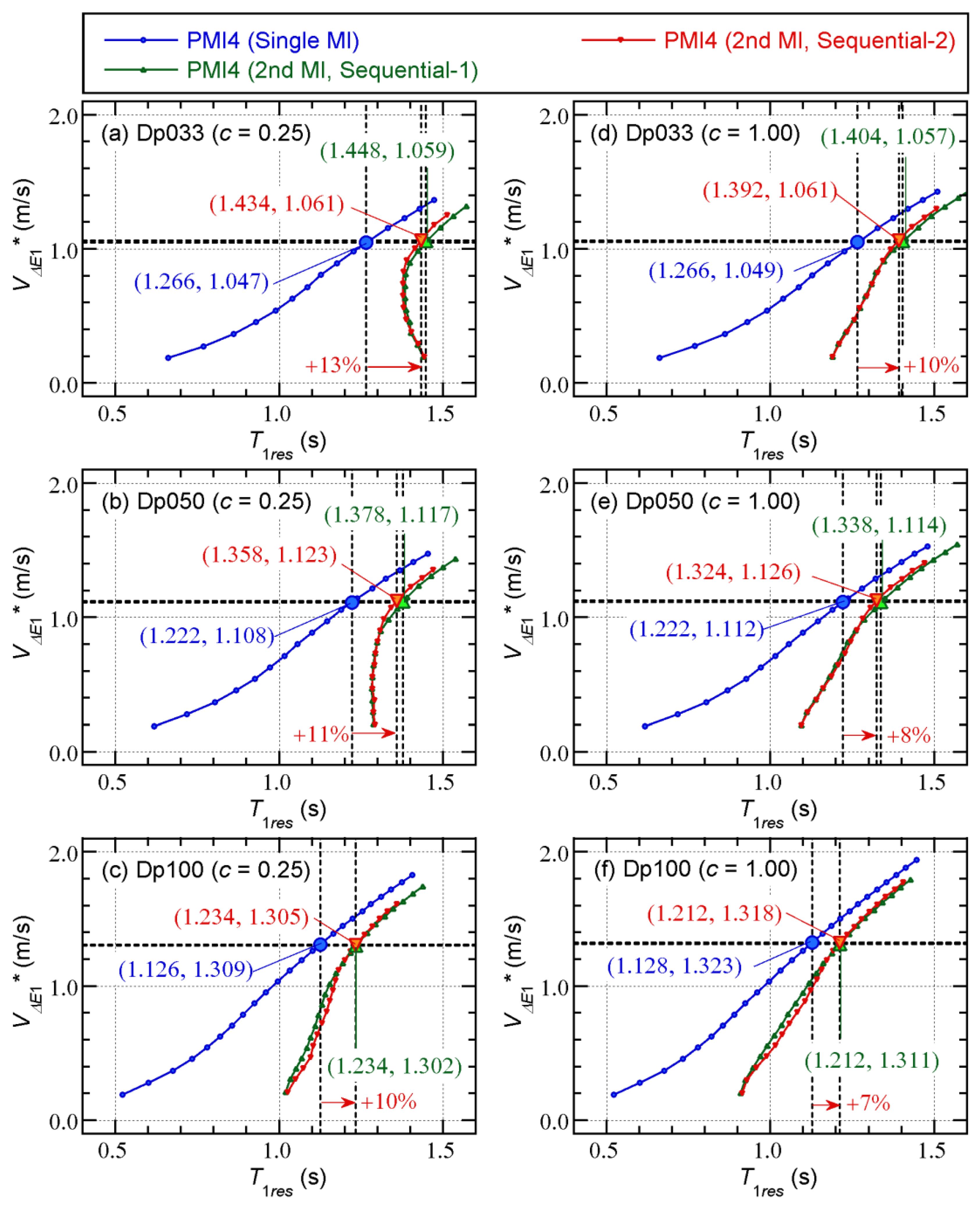
Figure 9.
Comparisons of the ESf / M – D1*max relationship. (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
Figure 9.
Comparisons of the ESf / M – D1*max relationship. (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
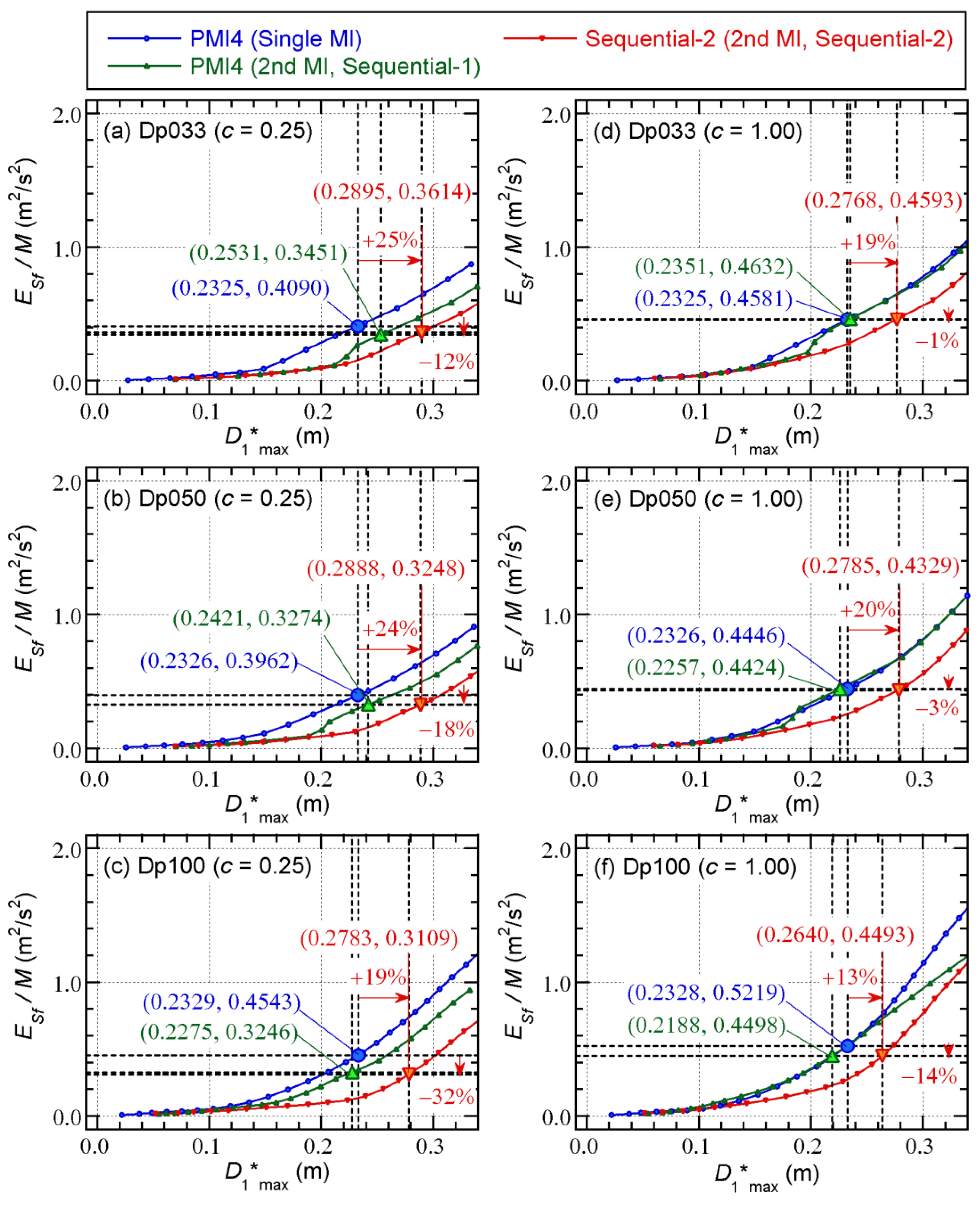
Figure 10.
Comparisons of the ESd / M – D1*max relationship. (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
Figure 10.
Comparisons of the ESd / M – D1*max relationship. (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
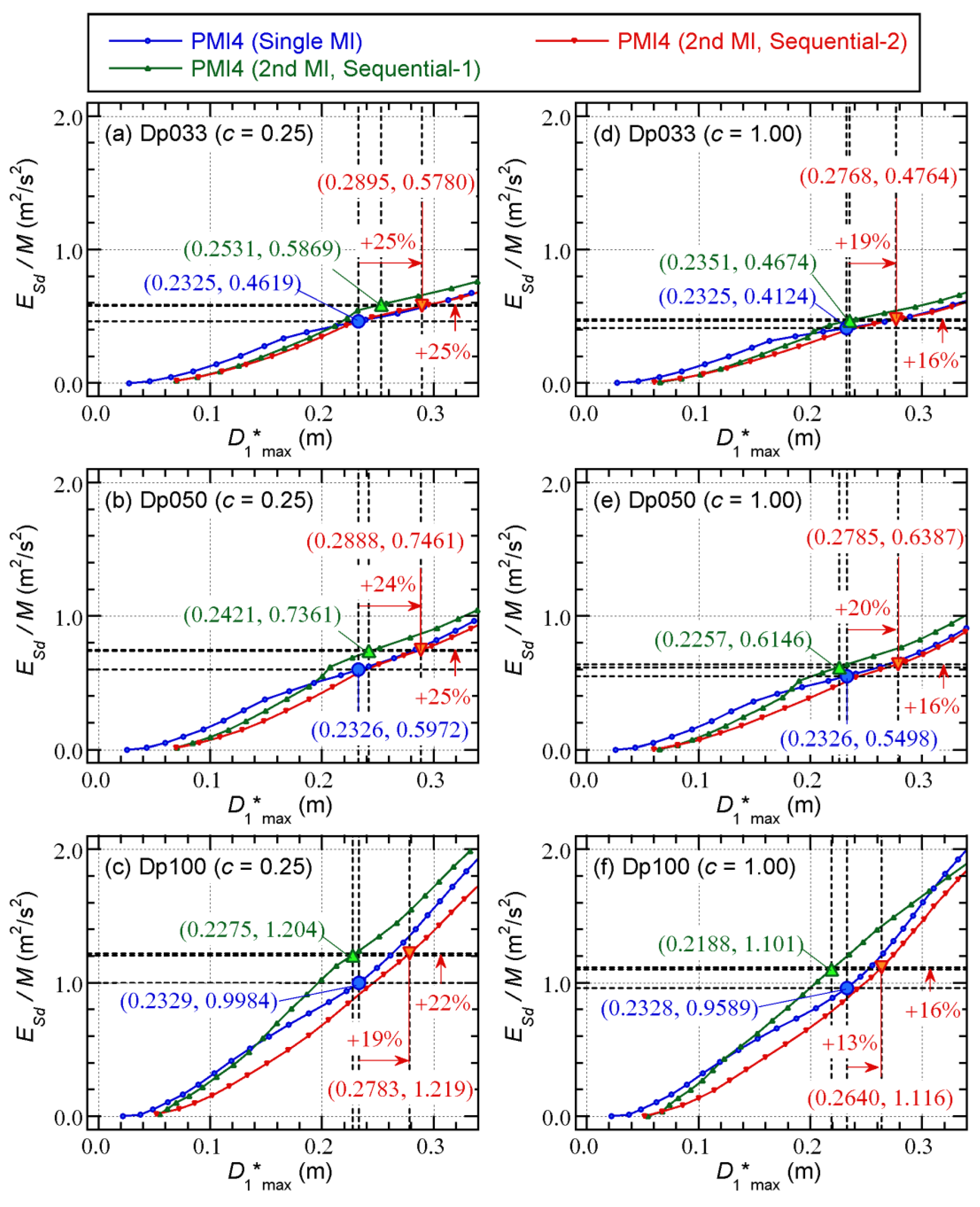
Figure 11.
Pulse-like ground motion model. (a) time-history of single-pulse model (Tp = 1.0 s, A = 1.0 m/s): (a1) ν = 0°, (a2) ν = 90°, (b) energy spectrum of single-pulse model (Tp = 1.0 s, A = 1.0 m/s): (b1) ν = 0°, (b2) ν = 90°, (c) time-history of sequential pulse model (1A = 2A = 1.0 m/s): (c1) ν = 0°, (c2) ν = 90°.
Figure 11.
Pulse-like ground motion model. (a) time-history of single-pulse model (Tp = 1.0 s, A = 1.0 m/s): (a1) ν = 0°, (a2) ν = 90°, (b) energy spectrum of single-pulse model (Tp = 1.0 s, A = 1.0 m/s): (b1) ν = 0°, (b2) ν = 90°, (c) time-history of sequential pulse model (1A = 2A = 1.0 m/s): (c1) ν = 0°, (c2) ν = 90°.
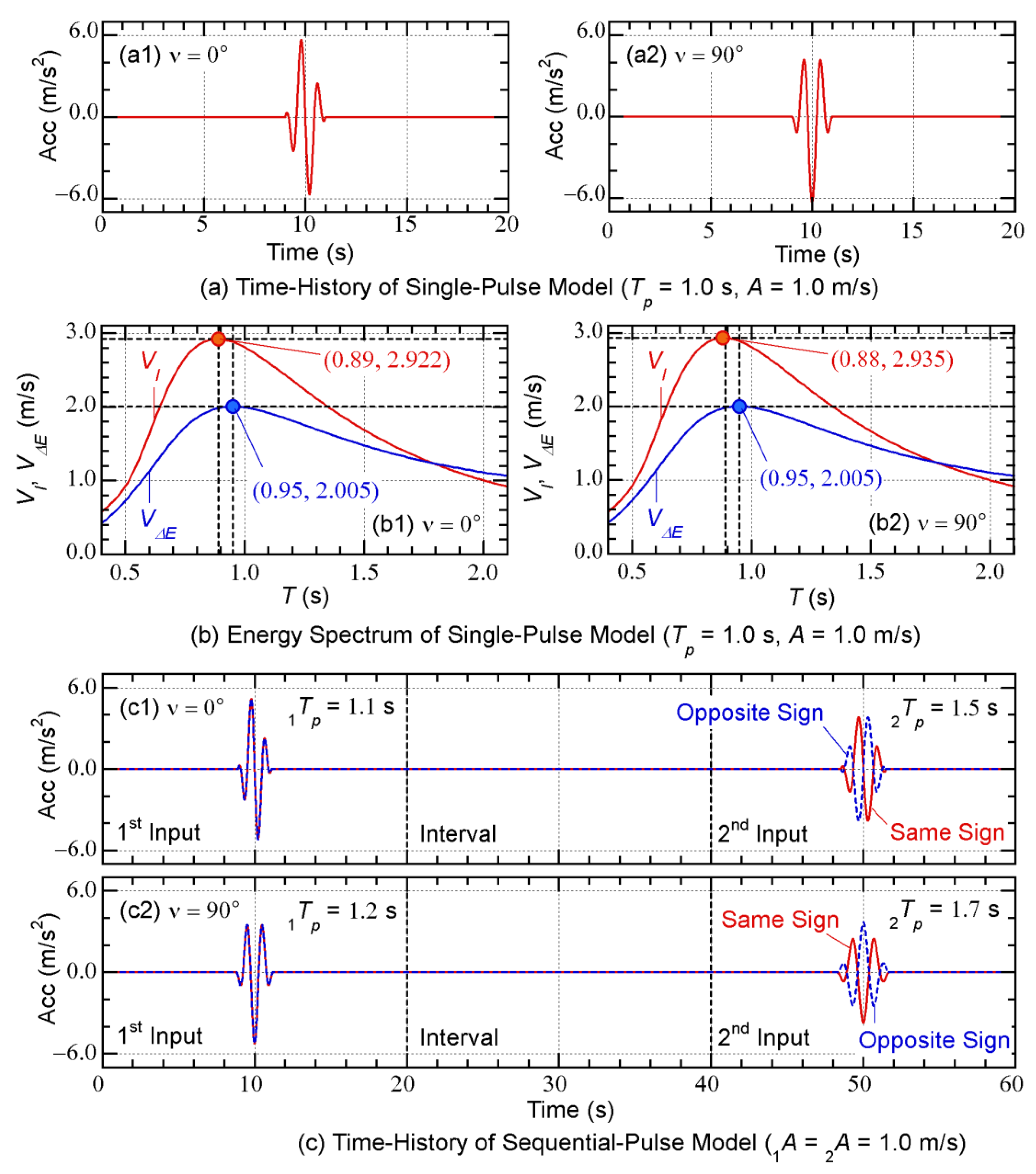
Figure 12.
Comparisons of the local responses (single-pulse model). (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
Figure 12.
Comparisons of the local responses (single-pulse model). (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
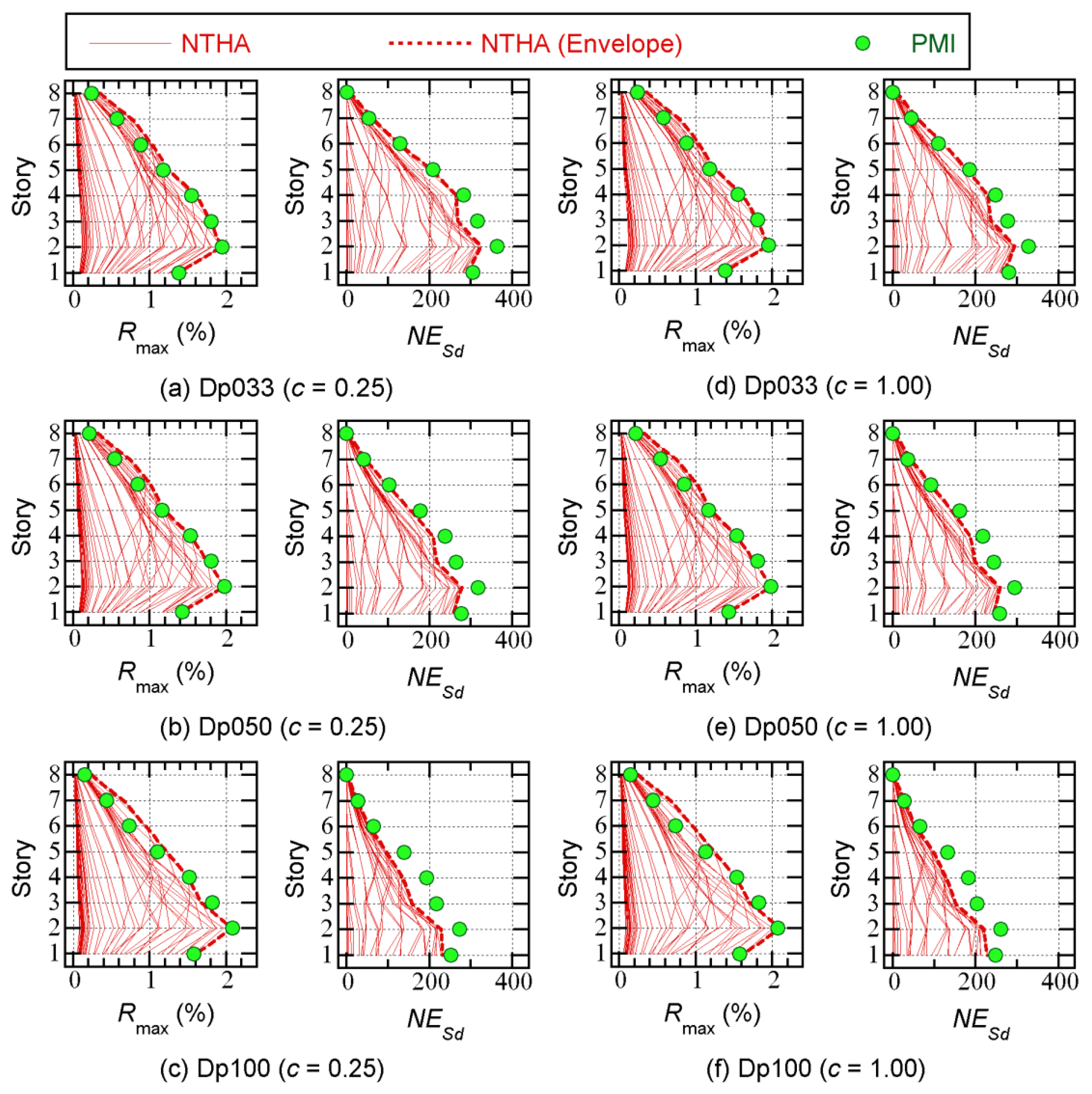
Figure 13.
Comparisons of the D1*max – Tp relationship (single-pulse model). (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
Figure 13.
Comparisons of the D1*max – Tp relationship (single-pulse model). (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
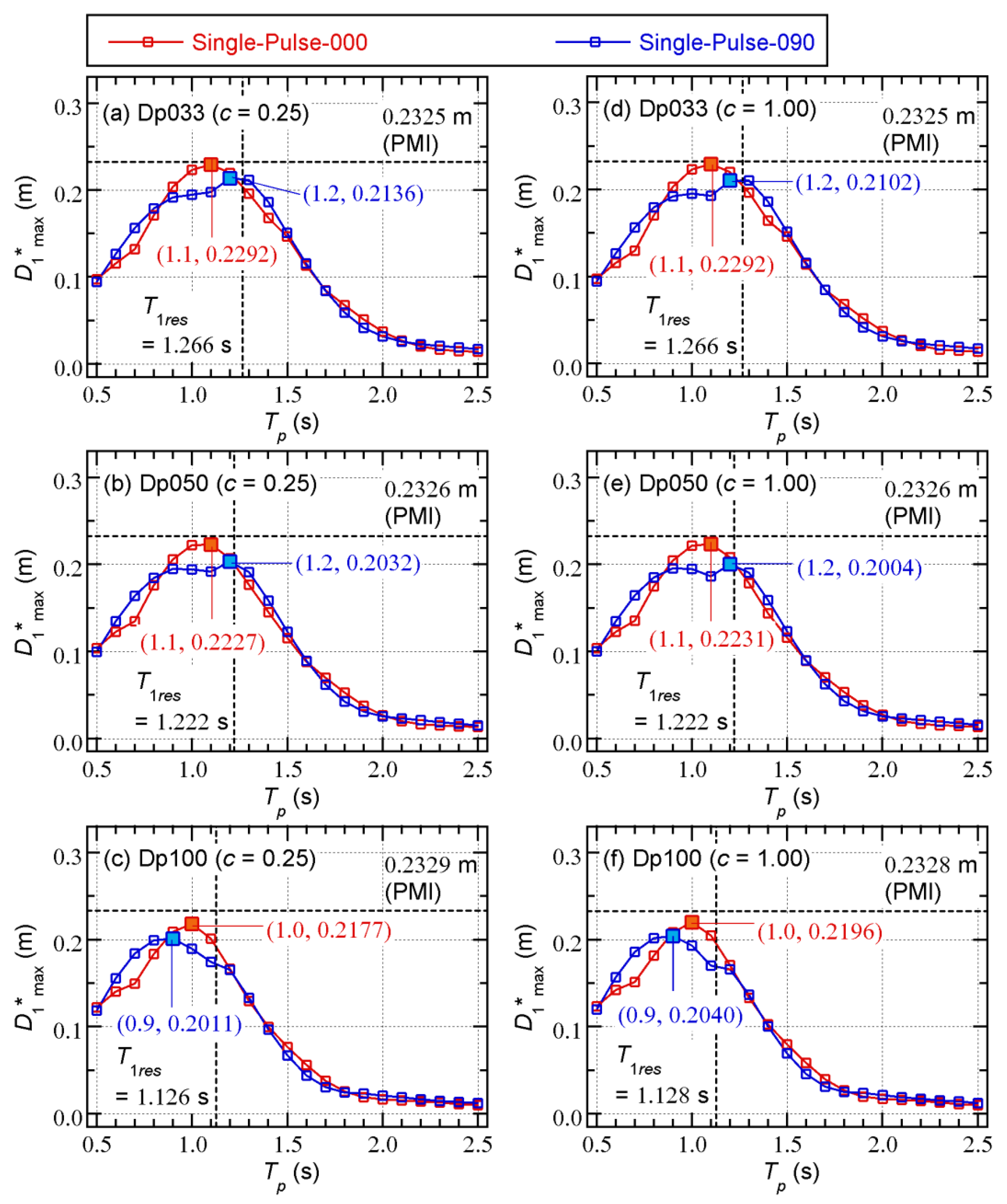
Figure 14.
Comparisons of the local responses (sequential-pulse model). (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
Figure 14.
Comparisons of the local responses (sequential-pulse model). (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
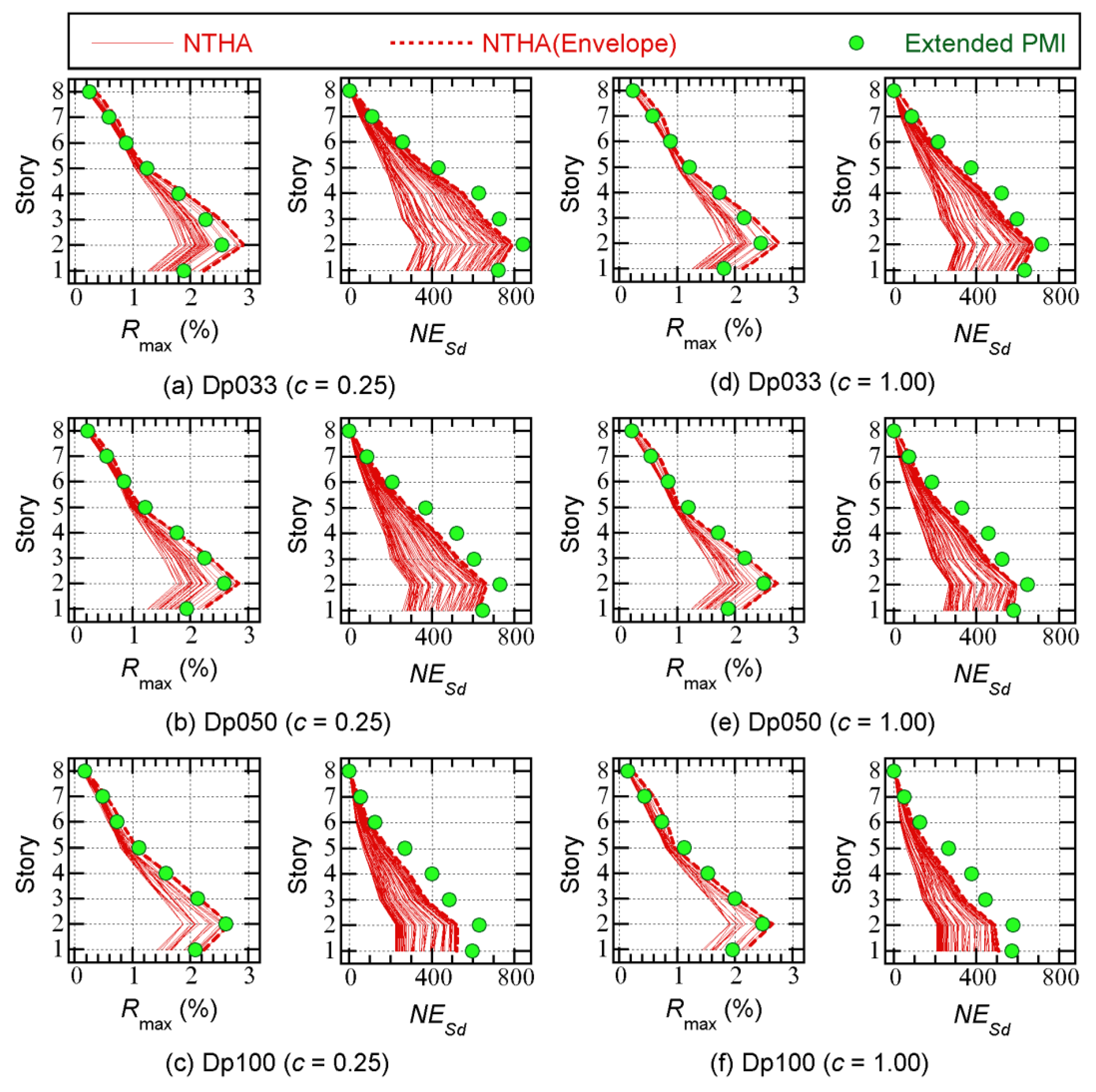
Figure 15.
Comparisons of the D1*max – Tp relationship (sequential-pulse model). (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
Figure 15.
Comparisons of the D1*max – Tp relationship (sequential-pulse model). (a) Dp033 (c = 0.25), (b) Dp050 (c = 0.25), (c) Dp100 (c = 0.25), (d) Dp033 (c = 1.00), (e) Dp050 (c = 1.00), (f) Dp100 (c = 1.00).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



